이더캣 통신과 이더넷 통신 차이점
산업용 컴퓨터 기술에는 네트워킹이 필요하며, 이는 항상 유용성과 단순성의 충돌을 초래합니다. 이것이 속도와 보안을 유지하면서 더 빠르고 안정적인 형태의 데이터 전송을 시도하면서 많은 경쟁 표준이 발생하는 이유입니다. 이러한 모든 특성을 최적화하는 통신 채널 중 하나는 EtherCAT입니다.
1. EtherCAT이란?
EtherCAT은 산업용 장치를 고속으로 연결하도록 설계된 이더넷 기반 필드버스 프로토콜로, 컨트롤러와 서보 드라이브 또는 모터 동기화용 드라이브와 같은 장치 간의 신속한 통신을 제공합니다. 장점 중 하나는 이더넷 네트워크를 사용하여 합리적으로 가능한 한 실시간에 가까운 산업용 장치와 통신할 수 있다는 것입니다.
실시간은 모든 정보가 지연 없이 전달되고 지터 시간의 변동이 매우 적어 이 프로토콜이 지속적인 고속 통신을 보장할 수 있음을 의미합니다. 절대적인 실시간 데이터는 불가능하지만 일부 프로토콜은 고속 응답을 위한 더 나은 환경을 생성합니다.
그 특성으로 인해 EtherCAT 프로토콜은 로봇 애플리케이션, 포장 기계, 자동 조립 기계, 안전 애플리케이션 등에서 자주 볼 수 있습니다. 이러한 모든 적용 사례에는 빠른 통신이 필요하다는 공통점이 있습니다.
2. EtherCAT과 Ethernet 통신
EtherCAT은 이더넷과 동일한 표준을 기반으로 합니다. EtherCAT은 모든 물리적 및 데이터 링크 표준을 포함하는 IEEE 802.3을 사용하여 산업 작업장과 같은 LAN(Local Area Network)의 모든 장치를 통신합니다.
공장 현장에서 일반 이더넷 모델의 주요 단점 중 하나는 대부분의 인프라가 작동하는 데 필요한 주소 지정 및 구성 정보를 전송하고 처리하는 데 추가 시간이 필요하다는 것입니다. 허브, 스위치 및 라우터와 같은 하드웨어는 신호를 올바르게 라우팅하기 위해 모든 메시지에 포함된 이러한 추가 구성 정보 바이트에 의존합니다.
OSI 모델의 7개 계층을 분석하고 EtherCAT을 TCP/IP 패키지와 비교한 결과, EtherCAT은 산업 네트워크 수준에서 데이터가 가장 중요한 메시지 구성 요소이기 때문에 데이터 전송에 계층 1과 2만 사용합니다.
OSI 모델의 7개 계층

3. EtherCAT과 Ethernet의 속도 차이
EtherCAT은 일반적인 이더넷 프레임에서 전송되는 페이로드 정보가 감소하여 일반 이더넷 모델에서 벗어나며 OSI 모델의 레이어 3-7을 제거할 수 있습니다. 이 최적화는 EtherCAT 네트워크의 단순성 때문에 가능합니다.
장치 및 장비에는 이러한 정보가 필요하지 않지만 이는 EtherCAT 장치가 일반적인 이더넷 네트워크에 존재하지 않을 수 있음을 의미합니다.
Ethernet 802.3 프레임
| 프리앰블 8바이트 |
대상 주소 6바이트 |
소스 주소 6바이트 |
이더넷 유형 2바이트 |
페이로드 최소 46바이트 |
프레임 검사 4바이트 |
EtherCAT 프레임
| 헤더 2바이트 |
데이터 페이로드 12바이트 + 데이터 바이트 |
더 많은 데이터 페이로드... 12바이트 + 데이터 바이트 |
위의 표를 비교하기 위해 한 시스템에서 다른 시스템으로 하나의 DINT(Double Integer)를 전송하면 4바이트의 페이로드가 됩니다. 이더넷 메시지에서는 최소 46바이트로 확장되며, 4바이트의 데이터를 전송하기 위해 전체 프레임의 길이는 72바이트입니다.
이 길이를 하나의 데이터 페이로드에 있는 4바이트의 실제 데이터에 대한 EtherCAT 메시지와 비교합니다. 이제 전체 크기는 18바이트가 되어 이더넷을 통해 동일한 데이터를 전송하는 데 걸리는 시간의 1/4에 불과합니다!
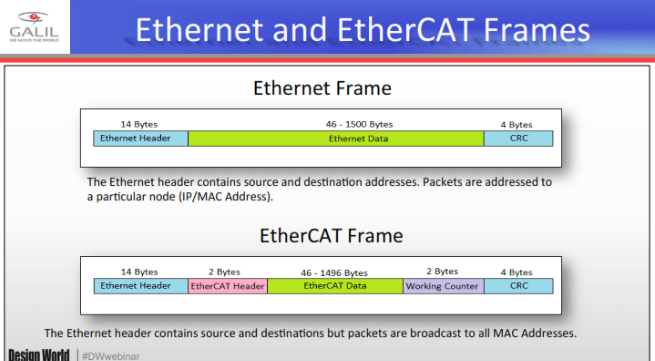
4. EtherCAT과 Ethernet 프레임의 차이점
이더넷에서 프레임에는 한 장치가 다른 장치로 직접 데이터를 전송하거나 더 일반적으로 연결된 모든 장치(멀티캐스트 또는 브로드캐스트)로 전송되는 동일한 데이터의 정보가 있습니다. EtherCAT에서 하나의 프레임은 모든 장치에서 시작하여 네트워크의 다른 장치로 이동하는 정보를 보낼 수 있습니다.
프레임 페이로드에는 각 디바이스가 전송할 데이터를 쓸 수 있는 특정 공간이 있기 때문에 이 작업을 수행할 수 있습니다. 이를 '데이터그램'이라고 합니다. 각 데이터그램에는 데이터에 액세스할 수 있는 장치와 쓰기 또는 읽기 전용이 가능한지 여부에 대한 정보가 포함된 헤더가 있습니다.
표준 이더넷 프레임의 2바이트 '유형' 필드를 사용하면 EtherCAT 데이터 전송을 0x88A4(2바이트)로 식별할 수 있으므로 송수신 장치가 더 간단한 프레임을 인식할 수 있습니다. 이러한 방식으로 이더넷 네트워크를 통해 EtherCAT 메시지를 보낼 수 있지만 작은 데이터 크기의 이점이 손실됩니다.
EtherCAT의 진정한 힘은 표준 메시지 형식을 사용하여 대량의 데이터를 고속으로 공유할 수 있는 장치 수준에서 비롯됩니다.

여러 장치의 정보를 하나의 프레임에 넣으면 네트워크에서 모든 장치로 전달되는 프레임 수가 줄어들어 지연과 지터가 줄어듭니다. 이더넷에서는 하나의 프레임이 각 디바이스로 전송되며 목적지에 도달하려면 더 많은 정보를 포함해야 합니다. EtherCAT의 단순성은 또한 연결을 안정적으로 만듭니다. 네트워크에 더 많은 프레임이 있으면 지터가 더 높아질 수 있습니다.
이더넷은 많은 장치와 통신하고 이미지, 비디오 등과 같은 많은 양의 정보를 이동합니다. 그러나 EtherCAT은 32비트 레지스터, 아날로그 I/O, 디지털 I/O 등과 같은 더 적은 양의 정보로 더 빠른 속도로 장치를 연결합니다. 타임스탬프가 추가된 시간 정확도를 제공합니다. EtherCAT은 한 세그먼트에서 최대 65,535개를 연결할 수 있으므로 큰 네트워크 크기는 문제가 되지 않습니다.
5. 네트워크 장비: 허브, 스위치 및 라우터
EtherCAT의 경우 데이터를 전송하기 위해 스위치와 같은 네트워크 요소가 필요하지 않습니다. 모든 장치에는 서로 연결할 수 있는 두 개의 포트가 있으며 모든 장치는 프레임을 전달할 수 있습니다. 그러나 필요한 경우 스위치나 허브를 네트워크에 계속 연결할 수 있습니다. EtherCAT에서 지원하는 네트워크 토폴로지는 다음과 같습니다.
- 링
- 버스
- 트리
- 스타
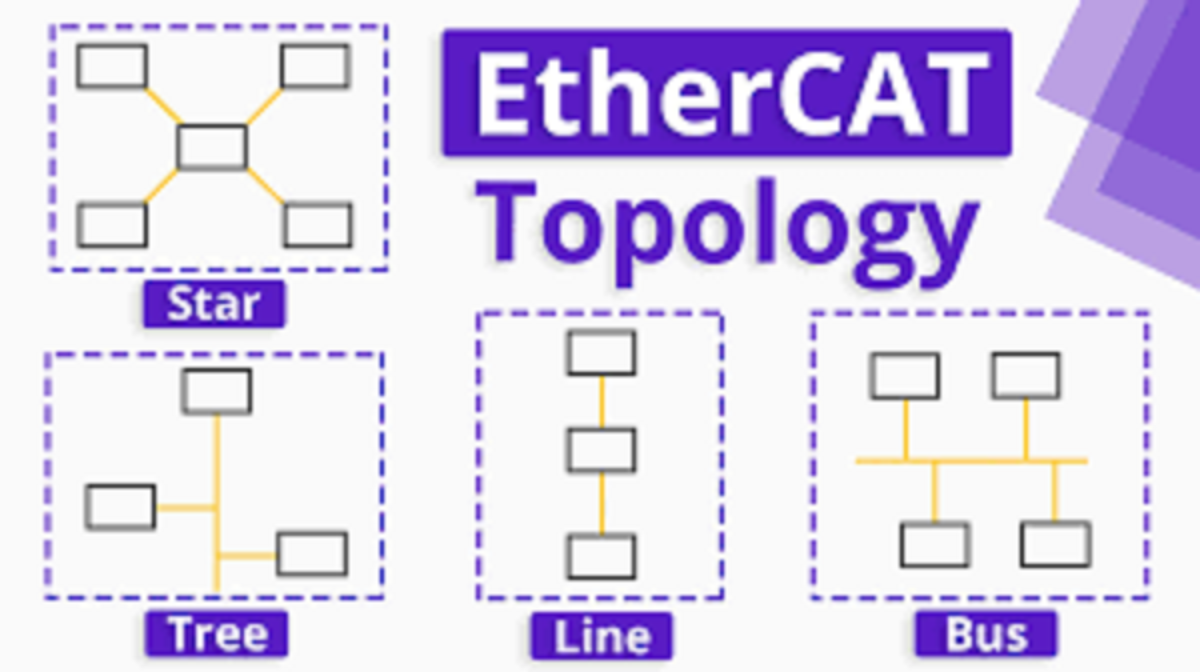
링 토폴로지를 통해 EtherCAT은 끊어진 링크에서 이중화 및 빠른 복구를 제공합니다. 이 토폴로지는 주 컨트롤러 장치에서 각 후속 장치에 수신 포트와 다음 장치로 나가는 포트가 있음을 의미합니다. 마지막 장치는 마침내 메인 컨트롤러에 다시 연결됩니다. 매우 간단한 토폴로지이며, 이 장비에는 네트워킹 장비를 추가할 필요 없이 링 네트워크를 생성할 수 있는 두 개의 포트가 있어 일부 비용을 절감할 수 있습니다. 링 주위의 네트워크 케이블이 끊어져도 모든 장치에 연결되어 있습니다.
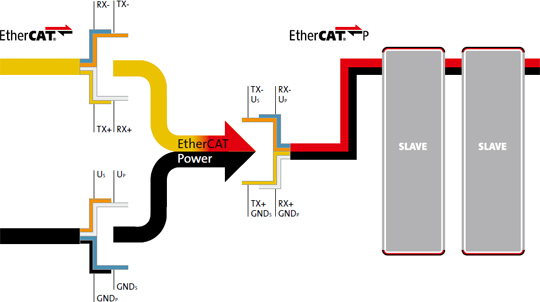
6. EtherCAT 케이블 및 커넥터
EtherCAT의 레이어 1은 이더넷과 동일합니다. 이로 인해 EtherCAT 네트워크에서 이더넷의 케이블과 커넥터를 사용할 수 있습니다. 일반적으로 컴퓨터를 연결하는 데 사용되는 표준 케이블은 사용하지 않는 것이 좋습니다.
EtherCAT의 경우 이 프로토콜이 산업용 애플리케이션용이기 때문에 물리적 시나리오가 다릅니다. 한 가지 중요한 요소는 전자기 노이즈입니다. 산업용 이더넷 케이블에는 케이블에 대한 전자기 유도를 방지하기 위해 전도성 차폐가 있습니다.
EtherCAT은 이더넷과 동일한 물리 계층을 가지고 있기 때문에 장비 사양에 따라 트위스트 페어 또는 광섬유를 사용하여 통신 속도에 따라 장치와 이더넷의 다른 범주 케이블을 연결할 수 있습니다. 즉, 장비의 이더넷 포트 및 케이블 범주의 특성에 따라 10Mbps, 100Mbps 또는 1Gbps의 속도로 정보를 전송할 수 있습니다.
