가속도계 사양의 이해를 위해 데이터시트에 있는 사양들에 대해 자세히 알아보겠습니다.
1. 가속도계 유형 - 정전 용량 MEMS, 압전, 압전저항
가속도계에는 용량성 MEMS, 압전 및 압전 저항의 세 가지 주요 유형이 있습니다. 가속도계의 데이터시트는 응용 분야에 적합한 가속도계 유형을 선택하는 것이 모든 차이를 만들 수 있기 때문에 정확히 어떤 유형인지 알려주거나 알려야 합니다. 일반적으로 정전 용량 MEMS 가속도계는 동작 감지 응용 제품에 가장 적합합니다. 압전은 진동에 가장 적합합니다. 압전 저항은 충격 테스트에 가장 적합합니다.

2. 주파수 응답 또는 대역폭
대역폭 또는 주파수 응답은 가속도계 선택에서 가장 중요한 매개변수입니다. 가속도계의 대역폭에 측정하려는 동작, 진동 또는 충격의 주파수가 포함되어 있지 않으면 정확한 결과를 얻을 수 없습니다. 주파수 응답 사양은 주파수 범위에서 감도의 최대 편차를 보여줍니다.
대역폭은 일반적으로 기준 주파수 감도(일반적으로 100Hz)를 기준으로 허용 오차 대역으로 지정됩니다. 허용 오차 대역은 백분율 및/또는 dB로 지정할 수 있으며 일반적인 대역은 ±5%, ±10%, ±1dB 및 ±3dB입니다.
대부분의 데이터 시트에는 사용자를 돕기 위해 일반적인 주파수 응답 곡선이 있습니다. 데시벨과 백분율 편차도 편리하게
비교합니다.
대역폭 정보는 가속도계가 느리거나 정적 가속도를 측정할 수 있는지 여부를 사용자에게 알려주고 가속도계가 여전히 정확할 수 있는 주파수 상한을 정의합니다.
대역폭의 낮은 범위가 0Hz(DC 응답이라고 함)로 이동하지 않으면 가속도계는 해양 환경에서 볼 수 있는 것과 같은 중력 또는 느린 진동(< 2Hz)과 같은 정적 가속도를 측정할 수 없습니다. DC 응답 가속도계는 속도(가속도 데이터 적분) 또는 변위(이중 적분)가 중요한 응용 분야에도 필요합니다.
DC 응답이 없는 가속도계에는 수치 적분 중에, 특히 장기간 이벤트에서 심각한 오류를 초래하는 고유 감쇠 함수가 있습니다. 그러나 더 높은 주파수(5Hz 이상), 주기적 운동 또는 단순 고조파 운동의 속도 또는 변위 진폭을 결정하는 데 사용할 수 있습니다.
센서의 주파수 응답은 일반적으로 고주파 끝에서 주로 센서의 기계적 공명에 의해 제어됩니다. 또한 앨리어싱을 방지하기 위해 사용되는 저역 통과 필터링의 결과이기도 합니다.
3. 감도
가속도계의 감도는 센서가 기계적 에너지를 전기 신호(출력)로 변환하는 속도를 정의합니다. 그리고 이것은 가속도계의 가속도 측정 범위를 정의합니다. 감도는 일반적으로 mV/g(밀리볼트 또는 g당) 또는 pC/g(g당 피코쿨롱)로 표시되며, 여기서 g는 중력 가속도 또는 9.81m/s2입니다.
그러나 디지털 출력 가속도계는 이를 LSB/g(g당 최하위 비트)로 지정합니다. 원하는 감도는 측정하려는 신호의 레벨에 따라 다릅니다. 작은 진동에 관심이 있는 경우 더 깨끗한 신호(더 높은 신호 대 잡음비)를 제공하기 위해 더 높은 감도가 바람직합니다. 충격 이벤트에 대해 더 높은 진폭을 측정하려고 할 때 더 낮은 감도가 필요합니다. 피에조레지스티브 가속도계는 일반적으로 감도가 매우 낮으며(1mV/g 미만) 추가 증폭기가 필요합니다.
4. 측정 범위
측정범위는 가속도계가 측정할 수 있는 가속도 진폭의 범위를 민감도에 정비례하여 정의합니다. 이것은 가속도계가 손상되기 전에 견딜 수 있는 가속 수준을 정의하는 충격 한계와 혼동해서는 안 됩니다. 일반적으로 가속도계 측정 범위의 하위 20%만 사용하여 예측할 수 없거나 예상치 못한 가속을 측정하기 위한 충분한 여유를 확보하는 것이 좋습니다.
5. 노이즈
노이즈 수준은 여러 가지 방법으로 정의할 수 있습니다. 일부 가속도계는 잔류 노이즈를 일반적으로 μV 또는 μg 단위의 광대역 RMS 값으로 정의합니다. 이것은 기계적 여기 없이 신호의 제곱 평균 제곱근을 취하여 계산됩니다. 광대역 노이즈 수준 이하의 가속은 해결할 수 없습니다.
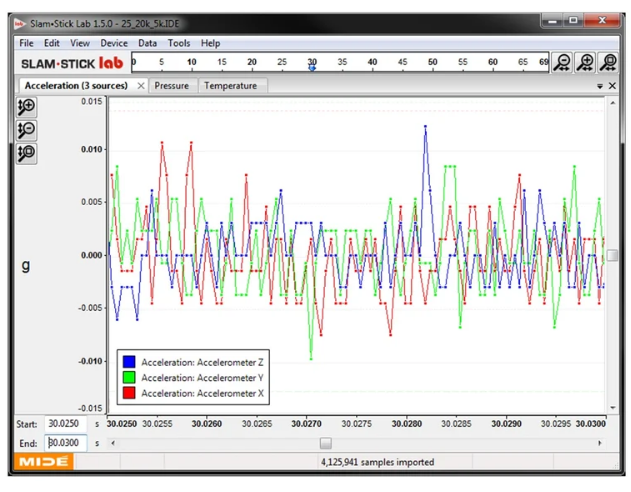
데이터시트는 소음 수준을 0.01g RMS 미만인 센서인 경우 5kHz 저역 통과 필터로 20kHz로 샘플링한 데이터는 아래 그림과 같으며 노이즈 수준이 일반적으로 이 ±0.01g 범위 내에 있음을 알 수 있습니다.
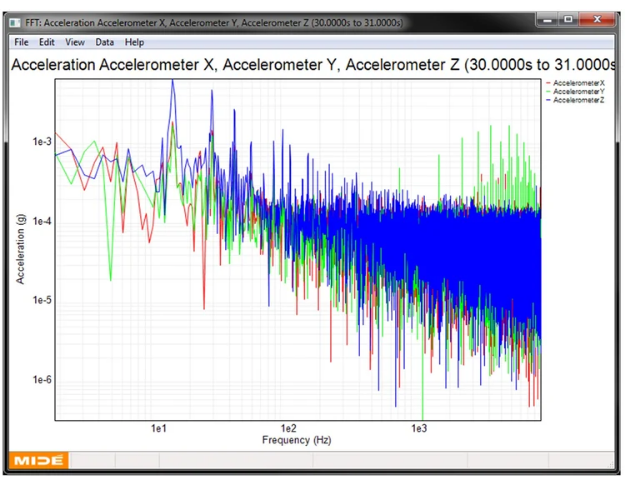
일부 가속도계 데이터시트는 μV/√Hz 또는 μg/√Hz 로 지정되는 스펙트럼 잡음 파라미터를 제공합니다.이 값에 측정 대역폭의 제곱근을 곱하면 이 결과는 센서의 공칭 RMS 가속 노이즈입니다. 많은 가속도계는 샘플 센서 기록의 노이즈 레벨의 FFT(고속 푸리에 변환)에서 볼 수 있듯이 노이즈 레벨이 더 높은 주파수에서 떨어지는 경향이 있기 때문에 다양한 범위에 대해 이 스펙트럼 노이즈 밀도를 지정합니다.
6. 해상도
가속도계의 분해능은 일반적으로 디지털 출력 가속도계 또는 아날로그-디지털 변환기를 통합한 시스템에만 제공됩니다. 해상도는 일반적으로 비트로 지정되며, 가속 단위로 해상도를 계산하는 데 사용할 수 있습니다.
예를 들어 가속도계 시스템의 해상도가 16비트라고 가정해 보겠습니다. 즉, 측정할 수 있는2^16(65,536)개의 가속 레벨 또는 빈이 있습니다. ±100g 측정 범위의 경우 이는 측정 가능한 가장 작은 가속도 수준인 0.003g(200/65536)의 분해능과 같습니다.
광대역 노이즈 이미지에서 데이터는 14비트 분해능의 ±25g 가속도계로 생성되었습니다(센서의 분해능은 8.5kHz 미만의 샘플링 속도에서 16비트까지 높아짐). 이것은 또한 0.003g(50/2^14)의 분해능과 같습니다. 그리고 이러한 데이터 포인트가 항상 최소 0.003g만큼 분리되는 것을 볼 수 있습니다.
7. 필터링
필터링은 신호 품질을 향상시키기 위해 일부 가속도계에 통합될 수 있습니다. 고역 통과 필터는 모든 압전 가속도계(저항기 및 커패시터가 직렬로 연결됨)에 내재되어 있어 이러한 가속도계에 AC 응답을 제공합니다.
저역 통과 필터는 가속도계 및 가속도계 시스템에서 매우 일반적이며, 이는 소프트웨어에서 필터링할 수 없는 앨리어싱을 방지합니다. 다양한 필터 유형(몇 가지 일반적인 필터 유형에는 Butterworth, Elliptical 및 Bessel이 있음)이 있으며, 디지털 가속도계 또는 가속도계 시스템에 대한 필터링이 중요하지만 필터링이 없는 제품은 피해야 합니다.
8. 온도 감도
온도 감도는 가속도계의 감도가 온도에 따라 변하는 방식을 정의합니다. 가속도계는 기계 시스템이므로 온도는 장치의 기계적 특성과 가속도계의 감도에 영향을 미칩니다.
온도 감도는 일반적으로 섭씨 온도당 백분율 이동(%/°C)으로 정의됩니다. 온도 감도가 높은 가속도계(압전 및 압전 저항이 경향이 있음)의 경우 온도의 영향을 상쇄하기 위해 그에 따라 출력을 조정하기 위해 일종의 온도 보상이 필요합니다. 일부 가속도계에는 이 보상이 포함됩니다.
온도 변화 및/또는 극한의 환경에서 테스트하는 경우 온도 감도를 간과할 수 없습니다. 50% 이상의 오류가 발생할 수 있습니다.
9. 횡방향 감도
횡방향 감도는 가속도계가 센서의 민감한 축에 대해 90도(또는 직교) 가속도에 얼마나 민감한지를 정의합니다. 이 매개변수는 백분율로 표시됩니다. 이상적으로는 0%여야 하지만 제조 허용 오차로 인해 횡방향 감도는 종종 5% 또는 10%입니다.
'데이터계측분석 > 센서 기술자료' 카테고리의 다른 글
| 4-20mA 아날로그 전류 신호 (0) | 2024.07.24 |
|---|---|
| 압전 가속도센서의 기초 (0) | 2024.07.23 |
| MEMS 마이크로폰 동작방식과 기술 (0) | 2024.07.12 |
| 엔코더의 종류 (0) | 2024.07.01 |
| 센서 사양 이해 (0) | 2024.06.24 |