모션 컨트롤
모션 제어는 "움직임을 제어하다"를 의미합니다. 한 가지 독특한 예는 다양한 모터에 의한 위치 제어입니다. 모터에 전자 에너지를 부여함으로써 모터가 작동하고 이를 운동 에너지로 변환합니다. 이 기술은 가공 도구, 로봇 제어, 반도체 제조 장비, 사출 성형기 및 디지털 가전 제품 검사 기계에서 핵심적인 역할을 합니다.

모션 제어 보드
모션 제어 보드는 지정된 펄스 수 또는 주파수에서 펄스 트레인을 출력하는 기능을 탑재합니다. 목표 위치, 속도, 가속 및 감속 속도 등과 같은 모션 매개변수에 따라 제어 펄스를 자동으로 출력할 수 있습니다.
위치 제어를 위한 다양한 한계 입력 기능이 있습니다. 모터 드라이버는 모터 자체를 제어합니다. 모션 제어 보드는 모터 드라이버 유닛의 펄스 신호를 출력하고 모터를 제어합니다. 펄스 입력 유형 스테핑 모터 또는 서보 모터와 연결됩니다.
모터 드라이버 유닛
모터 드라이버 유닛은 스테핑 모터 및/또는 서보 모터를 구동하는 제어 유닛입니다. 이 드라이버 유닛에 대한 제어 신호를 설정/수집하면 모터 제어가 가능합니다.
스테핑 모터
스테핑 모터는 고정밀 위치 지정이 가능합니다. 입력 펄스에 동기화하여 단계적으로 특정 각도로 회전합니다. 스테핑 모터는 입력 펄스에 맞춰 정확하게 회전하기 때문에 회전량 검출이 필요 없는 고정밀 위치 결정이 가능합니다.
일반적인 분해능은 1단계(1펄스) = 1.8°, 0.72° 및 0.36°입니다.
기능
- 개방형 지붕 아래에서 고정밀 포지셔닝이 가능합니다.
- 시작 및 중지에 대한 탁월한 응답.
- 정지 각도 우발적 오류가 누적되지 않습니다. (표준 스테핑 모터의 경우 ±0.05°의 정확도로 고정밀)
- 정지 상태에서도 높은 자체 유지력이 예상됩니다.
- 낮은 속도에서 높은 토크를 얻습니다.
- 모터의 구조가 간단하기 때문에 유지 보수가 쉽습니다.
스텝 각도
스텝 각도는 스테핑 모터에 의해 모터 드라이버에 1 펄스가 입력될 때 모터가 회전하는 각도입니다.
1단계(1펄스) = 1.8°, 0.72°, 0.36°는 공각입니다. 펄스 수는 회전량을 할당하고 펄스 주파수는 회전 속도를 할당합니다.
예) 스테핑 각도가 50.0°일 때 72mm 동안 캐리어를 이동하기 위해 필요한 펄스 수는 얼마입니까?
-
모터 90° 회전에 필요한 펄스 수: 90 ÷ 0.72 = 125
-
펄스 모터 라운드 회전에 필요한 펄스 수 (360 °) : 125 × 4 = 500 펄스
-
원형 회전이 캐리어를 10mm 이동한다고 가정합니다(50mm ÷ 10mm = 5회 회전
-
필요한 이동 펄스 수 : 500 펄스 x 5 라운드 회전 = 2500 펄스
회전 속도
스테핑 모터의 회전 속도는 펄스 신호 속도에 정확히 비례합니다. 회전 속도와 펄스 신호의 관계는 다음 공식으로 설정됩니다. 펄스 수는 회전량을 할당하고 펄스 주파수는 회전 속도를 할당합니다.
모터 회전 속도(r/min) = 스텝 각도(°) / 360° × 펄스 속도(주파수: Hz) × 60
예) 스테핑 각도 = 0.72°, 펄스 속도 = 1000Hz인 경우의 모터 속도모터 회전 속도(r/min) = 0.72/360 × 1000 × 60 = 120(r/min)
스텝 손실은 속도의 급격한 변화(가속 및 감속) 또는 과도한 부하로 인해 스테핑 모터가 펄스와 동기화되어 회전할 수 없어 정지 또는 오프셋 위치가 발생하는 경우를 말합니다. 최근의 스테핑 모터는 손실 스텝을 발생시키지 않는 구조를 가지고 있다.
서보 모터
서보 모터에는 두 가지 유형이 있습니다. AC 서보 모터 및 DC 서보 모터. 서보 모터는 제조 공장의 가공 공구 및 산업용 로봇에 널리 사용됩니다. 서보 모터에는 회전 각도를 감지하는 인코더가 있으며 폐쇄 루프에서 고정밀 위치 지정이 수행됩니다.
특징
- 큰 가속 및 감속 토크를 발생시킬 수 있기 때문에 과부하 또는 급격한 펄스 속도 변화에서도 스텝을 잃지 않고 고속 응답이 예상됩니다.
- 저속에서 고속으로 부드러운 회전을 생성할 수 있으며 저소음으로 작동합니다.
- 작고 가벼운 크기에서 높은 출력이 예상됩니다.
인코더 입력이란 무엇입니까?
모션 제어 보드는 피드백 제어를 위한 카운터 기능을 장착합니다. 인크리멘털 엔코더(UP/DOWN 모션)에 연결하여 고정밀 피드백 제어가 가능합니다. 피드백 제어 자체에는 프로그래밍이 필요합니다.
입력 회로는 2상(A/B 상) 및 단상(UP/DOWN)과 호환됩니다. 차동 출력, TTL 레벨 출력 및 오픈 컬렉터 출력과 호환되는 인코더와 함께 사용할 수 있습니다.
주요 응용 프로그램
- 서보 모터의 펄스 출력 → 위치 정보 관리/제어
- 스테핑 모터에서 스텝 감지
펄스 출력 신호/방법
2펄스형(독립펄스 출력)
제어 유형은 두 개의 독립적인 펄스 신호를 방출하여 전진(CW) 및 후진(CCW)을 나타냅니다. CW(시계 방향)는 오른쪽 회전을 나타내고 CCW(시계 반대 방향)는 왼쪽 회전을 나타냅니다.

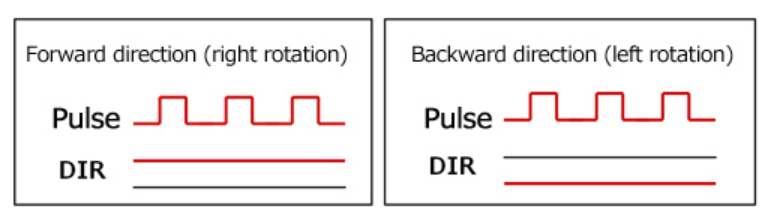
공통 펄스 유형(지향성 신호 출력: OUT(펄스 출력), DIR(지향성 출력))
이동 거리와 속도를 제어하는 하나의 펄스 신호와 회전 방향을 결정하는 신호로 제어합니다.
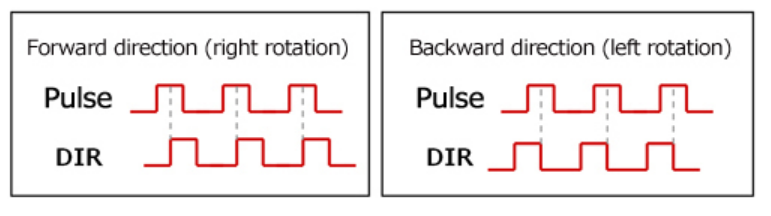
OUT(순방향 펄스 출력) 신호 및 DIR(지연 펄스 출력) 신호 유형
OUT(순방향 펄스 출력) 신호와 DIR(지연 펄스 출력) 신호를 출력합니다. DIR과 OUT의 위상이 +90° 다른 경우 앞으로(시계 방향) 이동(회전)합니다. DIR과 OUT의 위상이 -90° 다른 경우 뒤로(시계 반대 방향) 이동(회전)합니다.
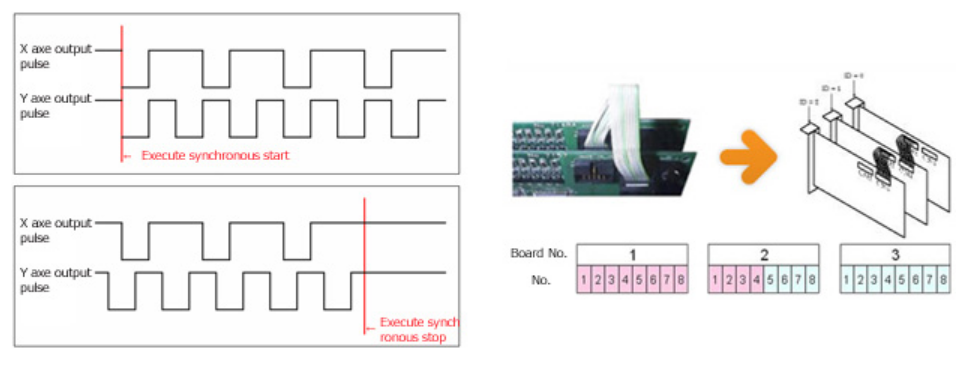
다축 동기화, 보드 간 다축 동기화
모션 제어 보드는 다축 간 동기화 시작/정지 제어를 동기화할 수 있습니다. 지정된 동기화 제어 케이블에 연결하여 최대 16 프레임 (128 축)의 동기화를 제어 할 수 있습니다. 8축 기판의 경우 4축으로 그룹화가 가능합니다.
입력 제한
모터(캐리어)의 정지점, 감속점, 원점을 감지하는 기능입니다. 고정밀 포지셔닝 제어가 가능합니다.
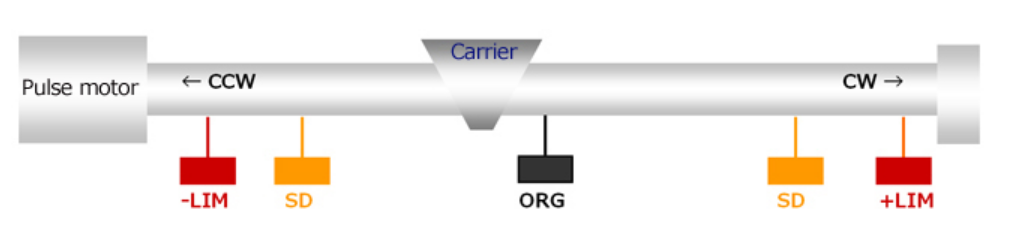
+LIM / -LIM(방향 제한): +는 시계 방향, -는 시계 반대 방향한계 위치를 감지하기 위한 입력 신호입니다. +LIM 모터 회전 방향은 CW(시계 방향)이고 -LIM 모터 회전 방향은 CCW(시계 반대 방향)입니다. 캐리어가 지점에 도달하면 모터는 어떤 조건에서도 즉시 멈춥니다.
이동 지시(순서)가 같은 방향으로 주어지는 한, 이 한계 위치 이상으로 이동하지 않습니다. 반대 방향으로의 이동 지시가 주어질 때만 모션(회전)을 다시 시작합니다.+SD / -SD(방향 감속): +는 시계 방향, -는 시계 반대 방향SD는 고속 회전 동작(가속 및 감속 동작 동작)에서 감속 시작점을 검출하기 위한 한계 입력이다.
고속 운동(전달)을 받는 캐리어는 이 위치에서 감속을 시작하고 시작 속도에 도달한 후 마침내 멈춥니다.ORG(원본 제한)다양한 동작의 표준에 대한 원점을 감지하기 위한 스위치 입력입니다. 소프트웨어로 로직 방향의 설정이 가능합니다. 설정에 의한 신호 입력시 멈춥니다.
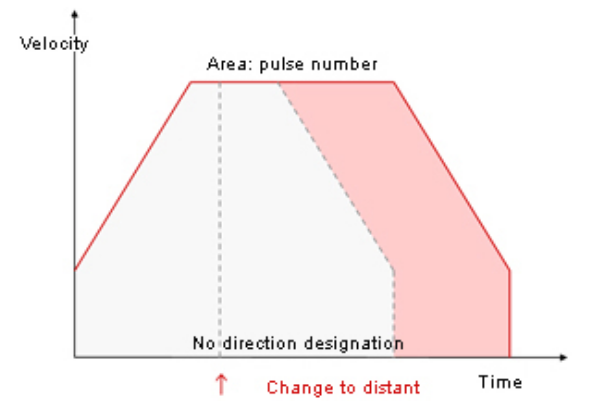
PTP 모션
PTP 모션은 한 지점에서 다른 지점으로의 이동(Point To Point)을 의미합니다. 간단한 포지셔닝 제어에 사용됩니다. 당사의 모션 제어 보드는 모션 중에도 원하는 타이밍에 정지 위치를 변경할 수 있습니다. 우측의 그림은 가속/등속 이동 중에 목표 위치를 더 변경하는 경우를 나타낸다.
예를 들어, 시작점에서 3000펄스 지점으로 이동하는 동안 정지하지 않고 5000펄스 지점으로 지점을 변경할 수 있습니다.
JOG 모션
JOG 모션은 이동 거리 지정이 없는 전송 모션입니다. 수동 모터 포지셔닝에 사용됩니다. 모터는 ±LIM 신호 입력 또는 정지 명령이 내려질 때까지 계속 작동합니다. 속도, 가속 및 감속 시간은 작동 중 원하는 타이밍에 변경할 수 있습니다.
ORG 모션
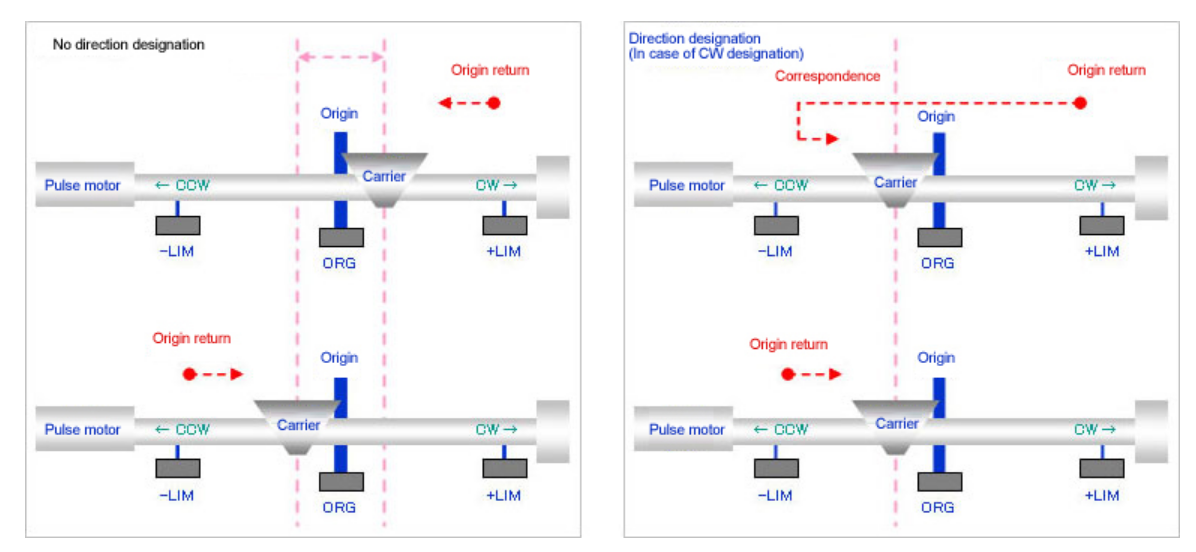
ORG(원점 복귀) 모션은 모터를 원점으로 이동시키는 동작입니다. 다음과 같이 독특한 원산지 복귀 운동을 할 수 있습니다. 원점 복귀 모션 설정에 따라 ORG 모션이 모션 타입으로 설정되며, 이동이 시작되면 원점 복귀가 완료될 때까지 운전자가 자동으로 제어합니다.
따라서 원점 반환 논리를 만들 필요 없이 원점 반환 모션이 쉽습니다.
원점 반환 끝 방향을 지정할 수 있습니다.원산지 한계 센서가 반드시 고정밀 센서일 필요는 없습니다. 따라서 포지티브 측과 음수 측에서 한계를 감지하는 경우 사이에 포지션 마진 오류가 발생할 수 있습니다.
이 문제를 해결하기 위해 한쪽에서만 한계를 감지합니다.NORG 필요 없음(원점 근처)원점 복귀를 위해 가속 및 감속 운동을 사용하는 경우, 원점 한계에서 절대적으로 정지하기 위해서는 원점 근처로 감속 정지 한계 센서가 필요했습니다. 원점 한계 센서만 원점에 가까운 원점으로도 작동할 수 있습니다.
등속 / 직선 가속 및 감속 / S-곡선 가속 및 감속
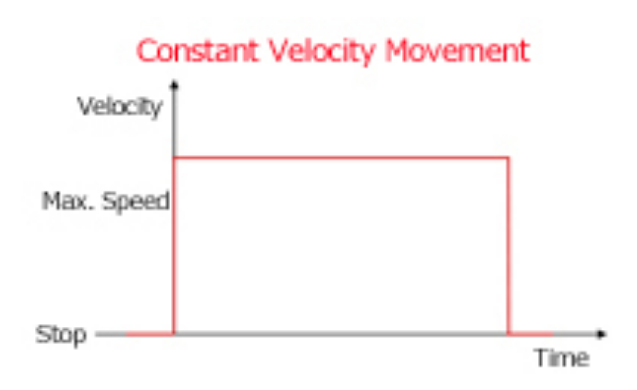
등속 운동
일정한 속도(주파수)로 펄스를 출력합니다. 장비는 일정한 속도로 움직입니다. 시동 및 정지 시 급격한 속도 변화가 발생합니다.
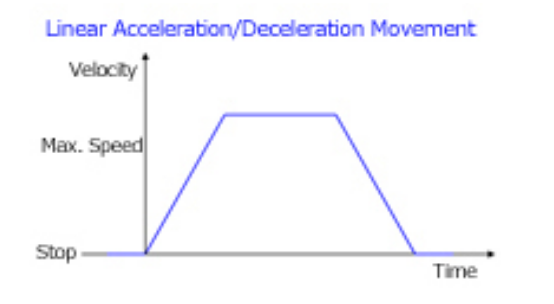
선형 가속/감속 운동
시동시 충격을 흡수하고 시동 및 정지시 일정한 속도로 속도를 가속 / 감속하여 정지하는 움직임. 사다리꼴 속도 제어라고도 합니다.
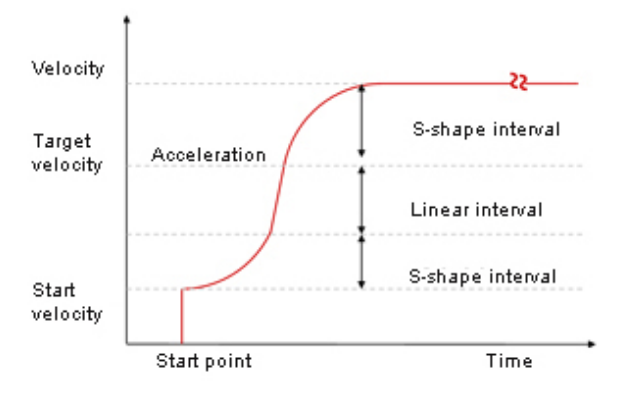
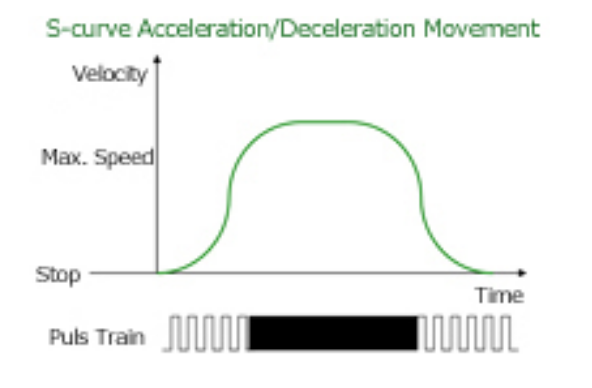
S-커브 가속 및 감속 운동
속도 제어 방법은 선형 가속 및 감속 운동에 대한 갑작스러운 충격을 더욱 줄입니다. 가속 및 감속의 기동 및 정지 구간에서 가속 속도를 감소시킴으로써, 무브먼트 시동 및 정지시의 충격이 감소됩니다.
보간 제어
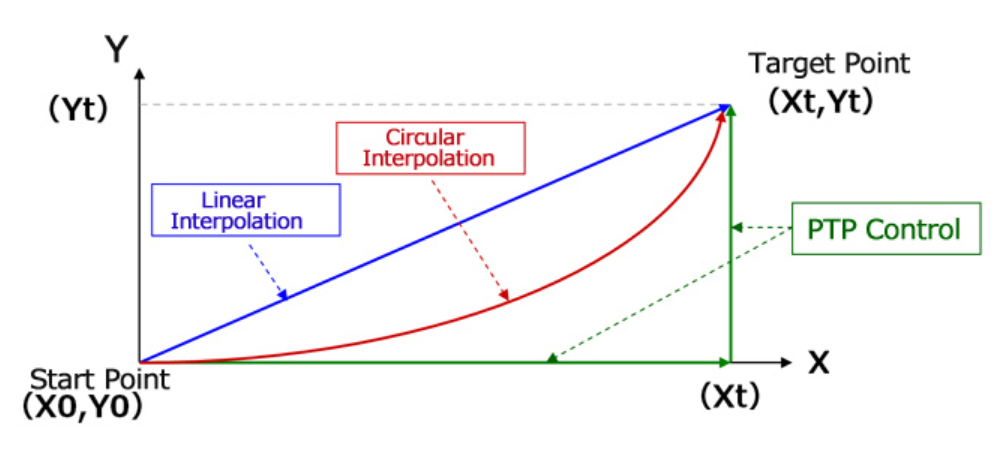
3개 이상의 축을 제어할 때 시작점에서 목표점으로 이동하는 3개의 다중 축 제어 유형.
PTP 제어(Point To Point)
먼저 X축을 점(Xt)으로 이동한 다음 Y축을 점(Yt)으로 이동합니다.
선형 보간
X축과 Y축을 모두 조정하고 궤적이 선형 프로파일을 따르도록 종료 지점(Xt, Yt)을 이동합니다.
원형 보간(Circular Interpolation)
원형에 원형과 목표점의 중심 좌표를 지정합니다. X축과 Y축을 모두 제어하는 동안 궤적이 프로그래밍된 대로 프로파일을 따르도록 점을 (Xt, Yt)로 이동합니다.
'데이터계측분석 > 전기전자 기술자료' 카테고리의 다른 글
| 옴의 법칙 – 전압, 전류 및 저항 (0) | 2023.05.11 |
|---|---|
| 교류(AC)와 직류(DC) (0) | 2023.05.11 |
| 디지털 신호란? (0) | 2023.05.10 |
| 아날로그 신호란? (0) | 2023.05.10 |
| 저항의 종류 및 색상코드 (0) | 2023.05.10 |