진동은 원치 않는 진동이거나 모든 종류의 불균형으로 인한 장비나 기계 또는 그 하위 부품의 기계적 움직임을 말합니다. 진동은 압축기, 펌프, 터빈, 그리고 다른 회전 장비 또는 기계와 연결된 축삭에 존재합니다
1. 진동의 특성
진동을 세 가지 주요 매개변수로 특성화할 수 있습니다.
1) 진동의 진폭
진폭은 이름에서 알 수 있듯이 단순히 진동이 얼마나 심한지입니다. 즉, 진동의 실제 크기를 알려줍니다. 진동의 진폭이 더 크면 장비나 기계에 더 많은 손상을 줄 수 있습니다. 또한 이로 인해 치명적인 오류가 발생할 수 있습니다. 따라서 진동의 크기를 아는 것이 중요합니다.
진폭은 피크 진폭 또는 피크 대 피크 진폭 또는 제곱 평균 제곱근 진폭으로 표현할 수 있습니다. 피크 대 피크 진폭은 양의 피크와 음의 피크 사이의 차이를 표시하는 최대 진폭입니다. 피크 진폭은 장비 또는 기계가 영점에서 관찰한 가장 높은 진폭을 나타냅니다.

근은 제곱을 의미하며, 기계의 진동 진폭의 평균입니다. 진동은 본질적으로 정현파이며 정현파 파형의 평균값은 0입니다. 따라서 직접 평균화는 진동을 0으로 만듭니다.
진폭의 일반적인 단위는 인치/초 또는 밀리미터/초입니다
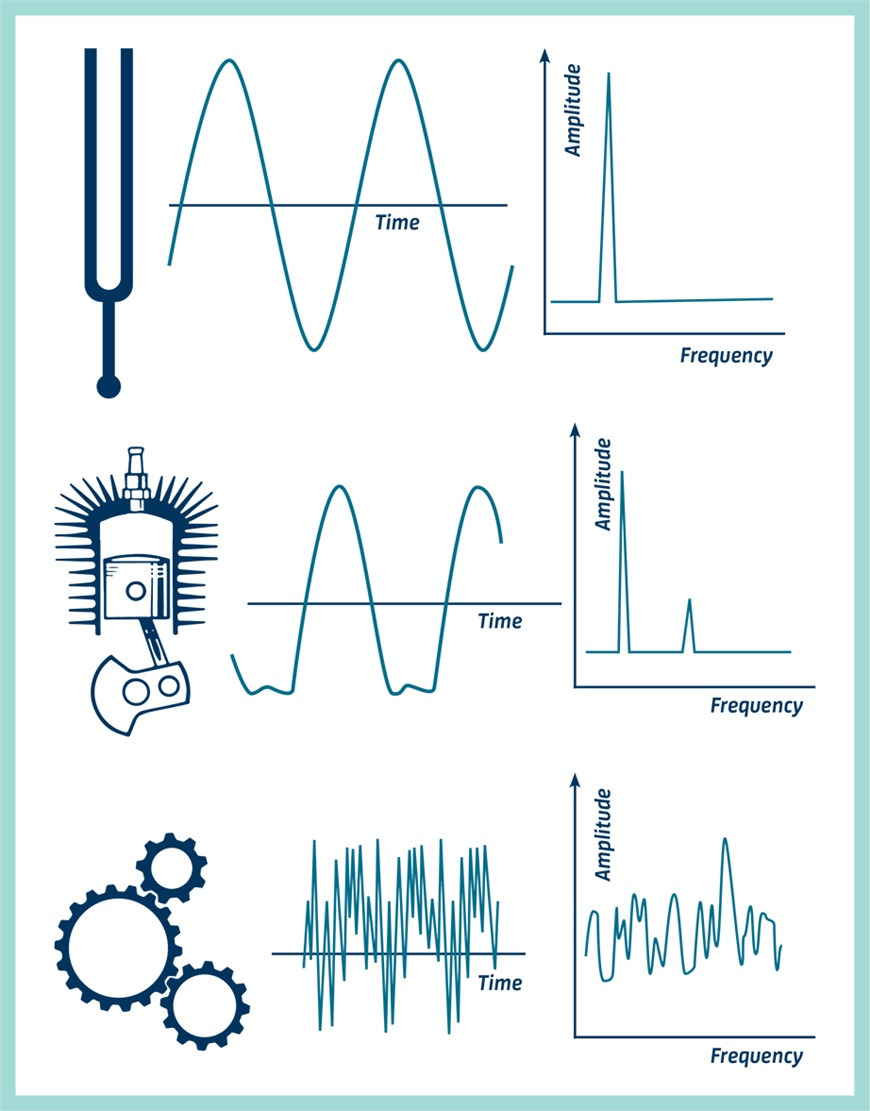
2) 진동의 주파수
시스템에서 진동이 지속적으로 발생합니다. 따라서 주파수는 이러한 진동이 얼마나 빨리 발생하는지 알려주는 매개변수일 뿐입니다. 주어진 장비 또는 기계가 진동하거나 진동하는 속도는 진동의 주파수입니다.
낮은 크기의 고주파 진동조차도 장비나 기계에 손상을 줄 수 있습니다.
진동의 주파수가 기계의 공진 주파수와 일치하면 기계에 취약합니다.
3) 진동의 위상
위상은 장비 또는 기계에서 지속적으로 발생하는 진동이 한 시작점에서 다른 시작점으로 이동하는 것입니다. 위상 용어는 일반적으로 두 개 이상의 장비 또는 기계 또는 부품의 진동을 비교할 때 사용됩니다.

2. 진동의 일반적인 원인
- 장비 또는 기계와 같은 압축기, 펌프 또는 터빈을 부적절하게 설치하면 진동이 발생할 수 있으므로 장비나 기계를 설치하기 전에도 설치 표면을 확인하고 균형을 이룹니다. 또한 장비나 기계를 설치한 후에는 장비나 기계의 균형을 맞추는 것이 필수입니다.
- 구동 장비 또는 기계와 구동 장비 또는 기계 사이의 부적절한 정렬은 이동 중에 생성되는 불균형으로 인한 높은 진동으로 인해 양쪽에 손상을 줄 수 있습니다. 정렬 불균형은 다양한 요인으로 인해 일정 기간 동안 발생할 수 있으며 장비 또는 기계 설치 중에도 발생할 수 있습니다.
- 장비 또는 기계의 베어링, 커플링 또는 기어와 같은 마모된 부품은 진동을 일으켜 작동 중인 다른 부품을 더욱 손상시킬 수 있습니다.
- 움직이는 느슨한 부품은 진동을 일으키고 다른 고정 부품도 손상시킬 수 있습니다.
3. 진동 측정
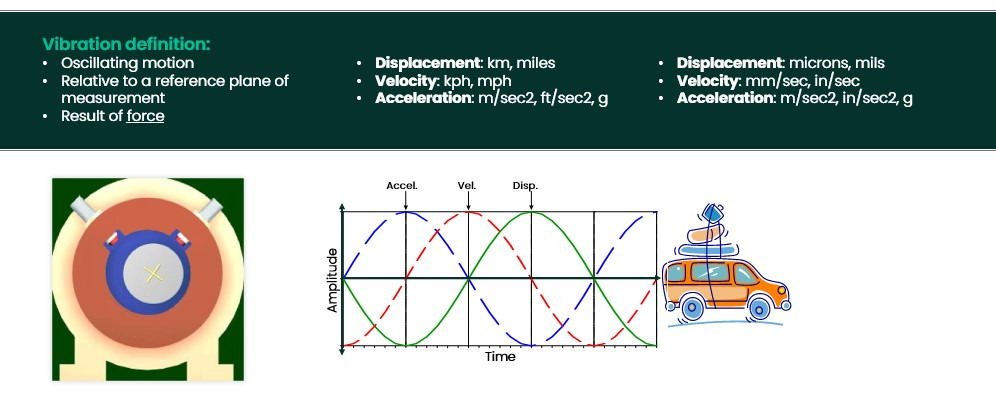
기계 진동은 일반적으로 변위, 속도 및 가속도 측면에서 측정됩니다.
- 변위는 이동한 거리입니다. 자동차의 경우 km 또는 마일과 같은 큰 단위를 사용합니다. 진동의 경우 거리가 매우 작기 때문에 일반적으로 미크론(1/1000mm) 또는 밀(1/1000인치)을 사용합니다.
- 속도는 변위의 시간 변화율입니다. 운송의 경우 km/hr 또는 miles/hr과 같은 큰 단위를 사용합니다. 진동의 경우 mm/s 또는 IPS로 측정됩니다.
- 가속도는 속도의 시간 변화율입니다. 운송을 위해 m/s2, ft/s2 또는 중력 가속도인 "G"와 같은 큰 단위를 사용합니다. 진동의 경우 m/sec2, in/sec2 또는 가장 일반적으로 중력 가속도 "G"를 사용합니다.
진동은 크기뿐만 아니라 아래 표시된 기계 진동 센서로 측정하는 수직 축과 유사한 방향도 포함합니다. 크기와 방향이 모두 있는 양을 "벡터"라고 하며 디스플레이스먼트, 속도 및 가속도는 모두 벡터입니다.
진동 신호는 다음과 같은 매개변수로 구성됩니다.
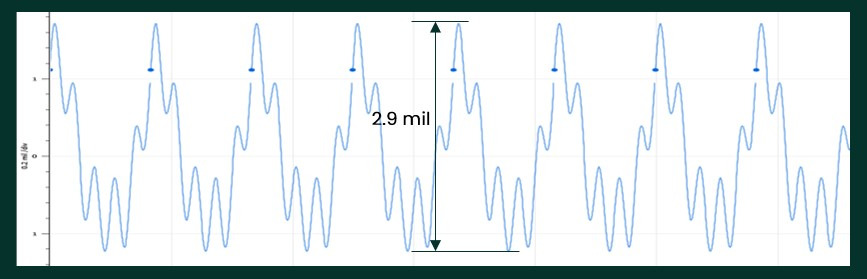
- Direct amplitude - 원래 신호의 총 진폭을 측정한 것입니다. 예를 들어, 아래 그림의 파형은 직접 또는 필터링되지 않은 파형이며 pk-to-pk의 진폭을 2.9mils Pk-Pk로 측정할 수 있습니다.
- 주파수 - 신호의 내용은 기계가 겪고 있는 가능한 오작동 범주에 대한 단서를 제공할 수 있습니다. 파형은 여러 주파수로 구성된 복잡한 파형이며, 일부 숙련된 기술자는 1X 및 5X임을 알 수 있지만 스펙트럼 플롯이라는 다른 플롯에서 이 정보를 얻는 것이 더 쉽고 신뢰할 수 있습니다.
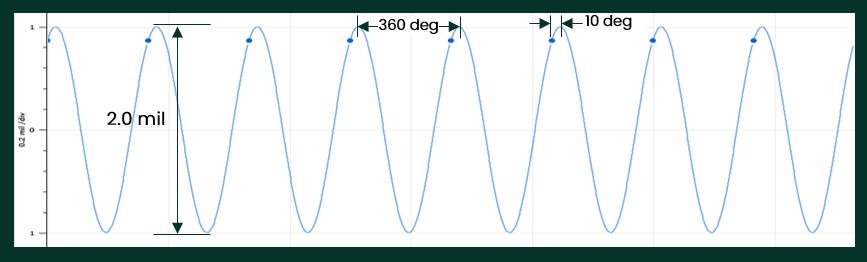
- nX 진폭 및 위상: 진동 신호를 개별 주파수 성분으로 분해하면 진폭과 위상을 모두 측정할 수 있습니다. 아래 이미지의 파형은 앞서 언급한 파형(위)의 필터링된 1X WF를 나타내며 진폭이 2.0mils pk-pk임을 알 수 있습니다. 또한 파형에서 작은 점으로 표시되는 키페이저® 신호는 타이밍 기준으로 간주됩니다. 전체 진동 주기가 360도이고 해당 위상이 주요 위상 이벤트에서 다음 양의 피크까지 측정된다는 것을 알고 있으면 위상이 ~10도임을 알 수 있습니다.
- 위치는 변위 변환기의 dc 구성 요소이며, 위치 정보는 특정 기계 오작동(예: 정렬 불량 및 불안정)을 분석하는 데 매우 중요할 수 있습니다.
- 모양 또는 형태 - 진동 모양의 미묘한 변화를 알면 진동의 원인, 근본적인 원인을 진단한 다음 취해야 할 적절한 조치를 더 정확하게 진단할 수 있습니다. 마찬가지로, 진폭, 주파수 및 위상 정보가 결합되어 진동의 특징적인 모양이나 형태를 제공합니다. 진동 신호의 형태는 때때로 개별 신호 측정만으로는 수행할 수 없는 중요한 변화를 강조할 수 있습니다.
기계식 진동 스위치도 진동을 감지하지만 이름에서 알 수 있듯이 중요한 장비나 기계에 전적으로 의존할 수는 없습니다.
정확한 진동 측정을 위해 세 가지 유형의 진동을 측정합니다.
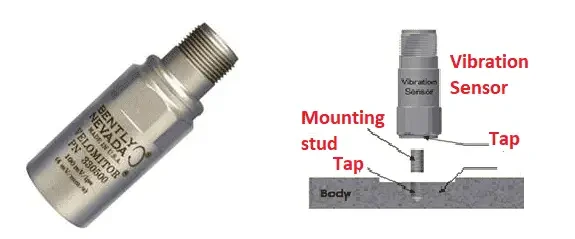
1) 전신 진동
- 전신 진동은 작지만 중요한 펌프, 모터, 기어박스 또는 기타 회전 장비나 기계에 적합합니다. 가장 일반적인 응용 분야는 냉각탑 팬의 기어박스에서 진동 측정과 모터 진동 측정입니다.
- 전신 진동을 측정하기 위해 회전 장비 또는 기계에 속도계 또는 가속도계를 장착합니다
- 이러한 유형의 진동 측정은 진동 센서가 신체에 부착되어 신체와 함께 진동하기 때문에 접촉식 진동 측정이라고도 합니다.
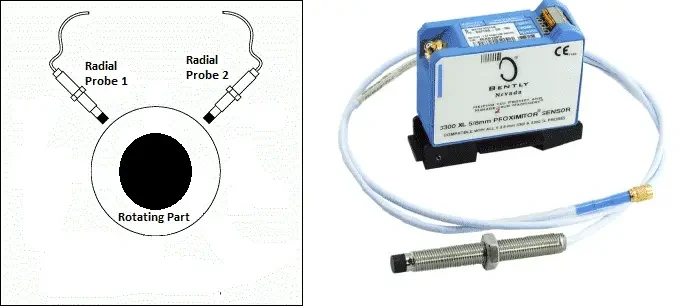
2) 방사형 진동
- 방사형 진동 측정은 압축기의 샤프트와 같은 회전 부품에 대해 수행됩니다.
- 일반적으로 방사형 진동을 측정하기 위해 2개의 근접 프로브를 사용합니다.
- 두 개의 방사형 진동 프로브는 완벽한 진동 움직임을 감지하기 위해 서로 90도 각도로 설치됩니다.
3) 축방향 진동
- 축 방향 진동 측정은 장비나 기계가 마모되는 것을 방지하는 데 매우 중요한 역할을 합니다.
- 샤프트 또는 스러스트 칼라의 선형 움직임(왕복 움직임)을 측정하기 위해 축 방향 진동 프로브를 설치합니다.
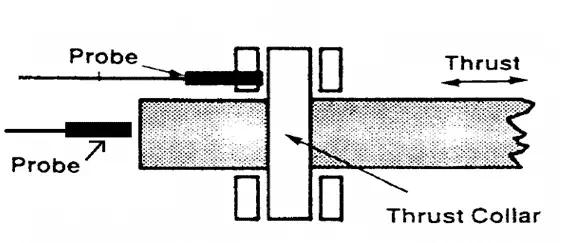
- 각 샤프트 또는 스러스트 칼라에 대해 단일 축 방향 진동 프로브를 설치합니다.
- 축 방향 이동은 전체 이동의 중심에 있거나 기술적으로 기계의 부동이라고 하는 제로 위치에 대해 양수 및 음수일 수 있습니다.
- 축 방향 측정에 사용되는 프로브 유형은 방사형 진동 측정에 사용하는 프로브와 동일합니다.
'데이터계측분석 > 전기전자 기술자료' 카테고리의 다른 글
| 펌프 캐비테이션 종류와 원인 (0) | 2024.08.16 |
|---|---|
| 압력측정의 기초 (0) | 2024.08.16 |
| 제벡 효과와 제벡 계수 (0) | 2024.08.15 |
| 전력품질 문제의 원인 (0) | 2024.08.15 |
| 변조의 종류 (Modulation) (0) | 2024.08.14 |