EtherCAT은 다양한 네트워크 토폴로지를 지원하는 고성능 이더넷 기반 산업용 통신 프로토콜입니다. 2003년에 등장하여 2007년부터 국제 표준이 되었습니다.
EtherCAT 작동 방식
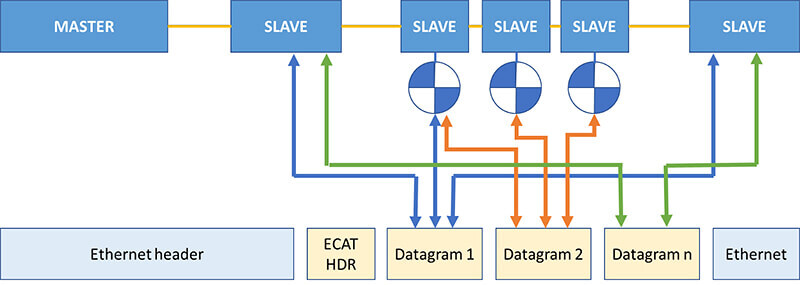
기존 이더넷 네트워크에서는 마스터 장치가 별도의 명령을 사용하여 슬레이브 장치를 폴링하는 반면, EtherCAT 프로토콜을 사용하면 하나의 명령만 보내 여러 슬레이브 장치를 한 번에 폴링하고 제어할 수 있습니다. 슬레이브 장치는 이더넷 프레임에서 필요한 데이터를 즉석에서 읽거나 전송을 위해 데이터를 쓴 다음 프레임을 다음 장치로 전달합니다.
이 메커니즘을 사용하면 네트워크 토폴로지의 제한 없이 하나의 네트워크에서 최대 65,535개의 장치(회선, 버스, 트리, 스타 또는 이들의 조합)를 고속으로 관리할 수 있습니다. 또한 다양한 토폴로지를 구성하기 위해 허브 또는 스위치가 필요하지 않기 때문입니다. 슬레이브 자체에는 여러 포트가 있습니다.
1000 EtherCAT 분산 디지털 I/O와의 통신 프로세스는 약 30 μs가 소요되며, 이는 125 Mbps에서 100 바이트 전송에 일반적입니다. 100개 서보 축의 데이터는 최대 10 kHz로 업데이트할 수 있습니다.
EtherCAT 프로토콜은 중앙 집중식 자동화 시스템과 분산 자동화 시스템 모두에서 사용할 수 있습니다. 마스터-슬레이브, 마스터-마스터, 슬레이브-슬레이브 모드는 물론 다른 산업용 프로토콜과의 통합을 지원합니다. 최상위 레벨에서는 기존 이더넷 인프라를 기반으로 작업할 수 있는 EtherCAT 자동화 프로토콜을 적용할 수 있습니다.
또한 EtherCAT은 프로세스 데이터 전송에 영향을 주지 않고 다양한 프로토콜의 실시간 전송이 가능합니다. Ethernet over EtherCAT 프로파일을 사용하면 FTP, HTTP, TCP/IP 등을 캡슐화할 수 있습니다.
EtherCAT 프로토콜은 이더넷 기술과 IEEE 802 사양을 기반으로 합니다.
동일한 이더넷 프레임과 물리적 계층을 사용하지만 추가로 다음을 허용합니다.
- 결정론적 응답 시간으로 하드 실시간 모드에서 작업
- 각각 적은 수의 I/O 포인트를 처리하는 많은 노드를 만듭니다
- 데이터 전송 인프라를 구축할 때 장비 비용 절감
명령 전송의 개시자는 마스터 장치만 될 수 있습니다. 다른 모든 장치는 마스터의 요청만 처리하고 추가로 전달하므로 예측할 수 없는 지연을 방지하고 실시간 데이터 전송을 보장합니다.
마스터 장치는 표준 이더넷 MAC(Media Access Controller)를 사용하며 특별한 네트워크 카드가 필요하지 않으므로 RTOS(English Real-Time Operating System - Operating System)에 관계없이 모든 이더넷 지원 하드웨어 플랫폼에서 마스터 장치를 구현할 수 있습니다. 실시간 시스템) 및 소프트웨어. 슬레이브 장치는 전용 EtherCAT 슬레이브 컨트롤러(ESC)를 사용하여 하드웨어 수준에서 프레임을 즉시 처리합니다.
EtherCAT 프로토콜
EtherCAT은 데이터 전송을 위해 일반 이더넷 프레임을 사용합니다. EtherCAT 프레임의 EtherType 필드에 ID 0x88A4 있습니다. EtherCAT은 작은 데이터 청크의 빠른 순환 전송에 최적화되어 있기 때문에 리소스 집약적인 TCP/IP 및 UDP/IP 프로토콜 스택을 사용하지 않습니다.

EtherCAT을 공통 IT 인프라에 통합해야 하는 경우 TCP/IP 트래픽은 실시간 제어 프로세스 데이터에 영향을 주지 않고 메일박스 메커니즘을 통해 터널링될 수 있습니다.
시동 중에 마스터 장치는 슬레이브 장치를 구성하고 해당 매개변수 목록을 정의합니다. 한 네트워크 노드의 데이터 양은 1비트에서 몇 킬로바이트까지 다양할 수 있습니다. EtherCAT 프레임에는 헤더와 여러 데이터그램이 포함됩니다.
데이터그램 헤더는 데이터 액세스의 유형을 나타냅니다.
- 읽기, 쓰기 또는 둘 다
- 직접 주소 지정을 통해 특정 장치에 액세스하거나 논리적(암시적) 주소 지정을 통해 여러 장치에 액세스
순환 폴링 외에, 데이터그램을 이벤트 기반(비동기적으로)으로 전송할 수 있다.
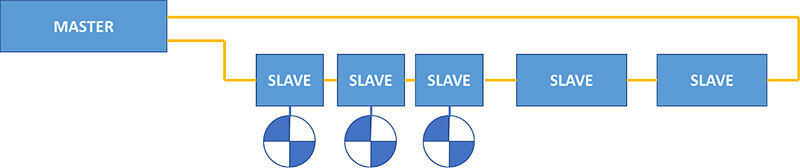
EtherCAT 네트워크 토폴로지
EtherCAT은 버스, 트리, 스타 또는 데이지 체인과 같은 거의 모든 기존 네트워크 토폴로지를 지원합니다. 또한 스위치 및 기타 중간 장비를 사용하지 않고도 수천 개의 장치를 EtherCAT에 연결할 수 있으므로 네트워크를 설계할 때 비용을 절감하고 제한을 피할 수 있습니다.
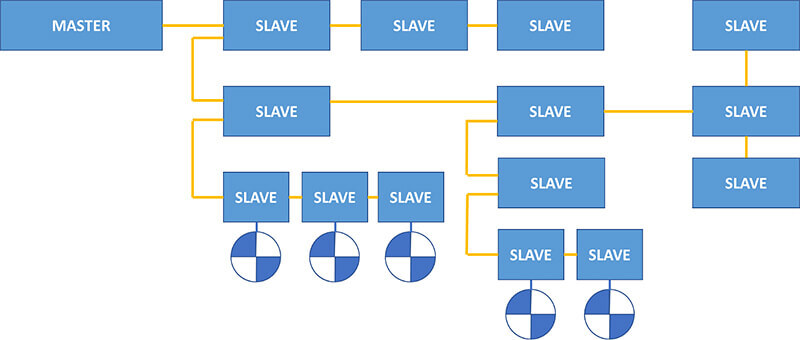
EtherCAT의 논리적 토폴로지는 버스이지만 물리적 연결은 무엇이든 될 수 있습니다. 이는 각 EtherCAT 장치에 여러 포트가 있기 때문에 수행됩니다.

마스터 장치는 슬레이브 장치의 포트 0으로 명령을 보내고, 여기서 명령은 EtherCAT 처리 장치에 의해 즉석에서 처리된 후 다음 포트로 전달됩니다. 포트가 다른 디바이스에 연결되어 있지 않으면 명령은 포트 0으로 마스터 디바이스로 돌아갈 때까지 변경되지 않고 다음 포트로 전달됩니다.
EtherCAT은 표준 이더넷 케이블과 호환됩니다. 예를 들어, 표준 100BASE-TX 모드에서는 장치 간 거리가 100m를 초과하지 않으면 100Mbps의 속도로 데이터를 전송할 수 있으며, 100m 이상의 거리에서 데이터를 전송하는 경우 광섬유(100BASE-FX)를 사용할 수 있습니다.
EtherCAT P(P는 전원을 의미함)는 단일 표준 4선 이더넷 케이블을 통해 데이터와 전원을 모두 전송할 수 있는 EtherCAT 표준의 확장입니다. 이 기능은 단 하나의 케이블로 통신 및 전원 구성으로 센서 버스를 만들 때 유용합니다. EtherCAT과 EtherCAT P는 프로토콜 측면에서 동일하며 물리 계층에서만 다릅니다.
EtherCAT P는 기존의 EtherCAT 장치와 동일한 네트워크에서 사용할 수 있습니다. EtherCAT을 EtherCAT P로 또는 그 반대로 변환하려면 특수 장치가 사용됩니다.
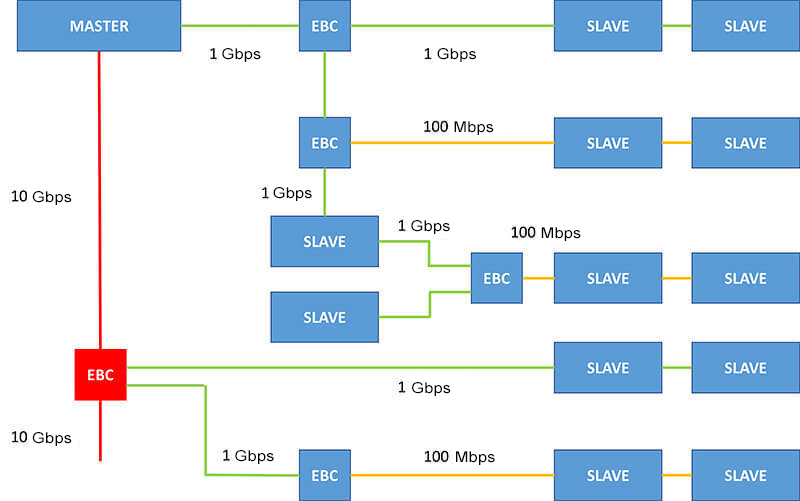
EtherCAT G/G10은 1Gb/s 또는 10Gb/s의 데이터 전송을 허용하는 EtherCAT 표준의 확장입니다. 머신 비전 작업, 빠른 파라미터 측정 또는 복잡한 모션 제어 애플리케이션에서 대량의 데이터를 전송할 때 특히 그렇습니다. EtherCAT G/G10은 모든 EtherCAT 기능을 지원하며 IEEE 802.3 표준을 완벽하게 준수합니다.
EtherCAT G는 EBC(EtherCAT Branch Controller) 장치를 사용하여 구현되는 분기 개념을 표준에 추가합니다. EBC는 기가비트와 메가비트(100Mbps) 네트워크 세그먼트 사이의 게이트웨이로, 다양한 유형의 네트워크를 단일 시스템에 쉽게 통합할 수 있습니다.
EtherCAT 네트워크 이중화 및 링 토폴로지
슬레이브 장치 중 하나의 케이블 파손 또는 고장으로 인해 전체 네트워크 또는 해당 세그먼트를 사용할 수 없어서는 안 되므로 EtherCAT에는 통신 채널 이중화 메커니즘이 내장되어 있습니다. 라인에 있는 마지막 슬레이브의 두 번째 이더넷 포트는 마스터 장치의 두 번째 이더넷 포트에 연결되며, 이를 통해 버스 토폴로지를 링 토폴로지로 변환할 수 있습니다.
마스터 측에서 케이블 단선 또는 슬레이브 오류가 감지됩니다. 슬레이브 장치는 링에서 작동하기 위해 수정이 필요하지 않습니다., 그들의 관점에서 이것은 일반적인 EtherCAT 작동과 다르지 않기 때문입니다.
오류가 감지될 때 네트워크 복구 시간은 15마이크로초를 초과하지 않으므로 오류로 인해 최대 한 번의 폴링 주기가 누락됩니다. 즉, 모션 제어 애플리케이션에서도 통신 케이블이 끊어져도 공정 오류가 발생하지 않습니다. EtherCAT을 사용하면 마스터 장치에 대한 상시 대기를 구성할 수도 있습니다.
잠재적으로 신뢰할 수 없는 통신 회선(예: 케이블 채널)은 메인이 아닌 EtherCAT 드롭 라인에 연결할 수 있으며, 케이블이 끊어진 경우 나머지 시스템은 평소와 같이 계속 작동합니다.
EtherCAT의 정확한 시간 동기화
EtherCAT은 분산 클럭(DC) 기술을 사용합니다.
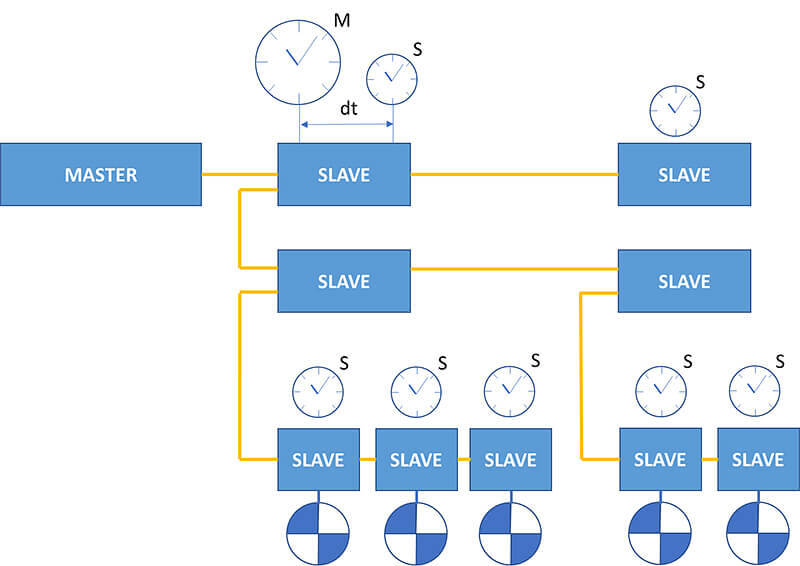
EtherCAT 네트워크에서 시간 동기화 메커니즘은 전적으로 하드웨어에서 구현됩니다. 슬레이브 장치의 클럭은 통신이 논리 및 전이중 물리적 이더넷 링 구조, 즉 각 EtherCAT 패킷이 각 슬레이브를 통해 두 번 이동하기 때문에 다른 클럭에 비해 지연을 쉽고 정확하게 측정할 수 있습니다(서로 다른 트위스트 페어의 순방향 및 반환 경로). 이 지연 값을 기반으로 분산 클록은 전체 네트워크에서 1μs 미만의 확산으로 매우 정확한 시간 기반을 달성하도록 조정됩니다.
EtherCAT을 통한 세이프티 프로토콜(SIS)
최신 자동화 시스템에는 시간에 따라 결정된 제어 신호 전송뿐만 아니라 동일한 통신 채널을 통한 중요한 정보 전송도 필요합니다. EtherCAT 표준은 이를 위해 FSoE - FailSafe over EtherCAT(Safety over EtherCAT) 프로토콜을 사용하여 다음을 허용합니다.
- 운영 및 중요 데이터 전송을 위해 단일 통신 채널 사용
- 보안 시스템의 아키텍처를 유연하게 변경하고 확장합니다.
- 이미 인증된 기존 장치 사용
- 보안 장치에 고급 진단 도구 사용
- 산업 안전 시스템을 자동화 시스템에 완벽하게 통합
- 동일한 도구를 사용하여 일반 시스템과 안정성 요구 사항이 높은 시스템을 모두 만들 수 있습니다
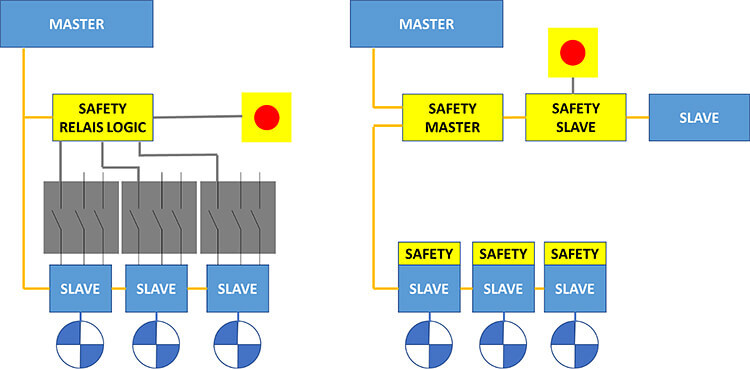
Safety over EtherCAT은 IEC 61508 표준에 따라 개발되었으며 TÜV의 인증을 받았으며 IEC 61784-3 표준으로 승인되었습니다. 이 프로토콜은 최대 SIL4의 기능 안전 요구 사항이 있는 시스템에서 사용하기에 적합합니다. Safety over EtherCAT을 사용하면 통신 시스템이 안전 시스템의 일부가 아닌 검은색 채널의 일부로 간주될 수 있습니다.
중요한 데이터 및 제어 신호의 전송은 단일 통신 채널을 통해 수행됩니다. Safety over EtherCAT 프로토콜 프레임(안전 컨테이너라고도 함)은 EtherCAT 프레임의 일부로 네트워크를 통해 전송되며 중요한 데이터를 포함합니다.
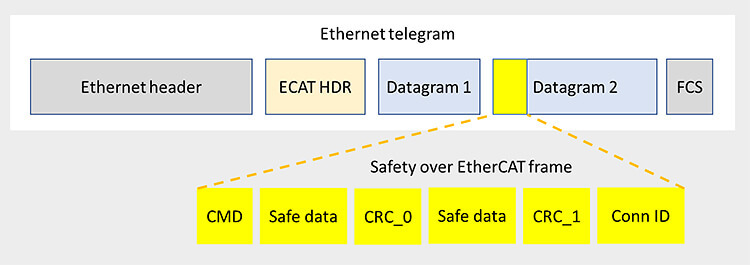
Safety over EtherCAT을 사용하면 제어 시스템의 다양한 부분을 쉽게 연결할 수 있습니다. 안전 컨테이너는 모든 슬레이브 장치를 통과하므로 일부 장비가 다른 프로토콜을 사용하여 연결되어 있더라도 전체 장비 또는 개별 장치의 비상 정지를 쉽게 구성 할 수 있습니다. FSoE 지원에는 상당한 하드웨어 리소스가 필요하지 않습니다.
이 프로토콜은 고성능과 낮은 응답 시간을 제공합니다. 예를 들어, 로봇 공학에서 FSoE는 8kHz의 주파수에서 작동하는 폐쇄 루프 시스템에 사용됩니다.
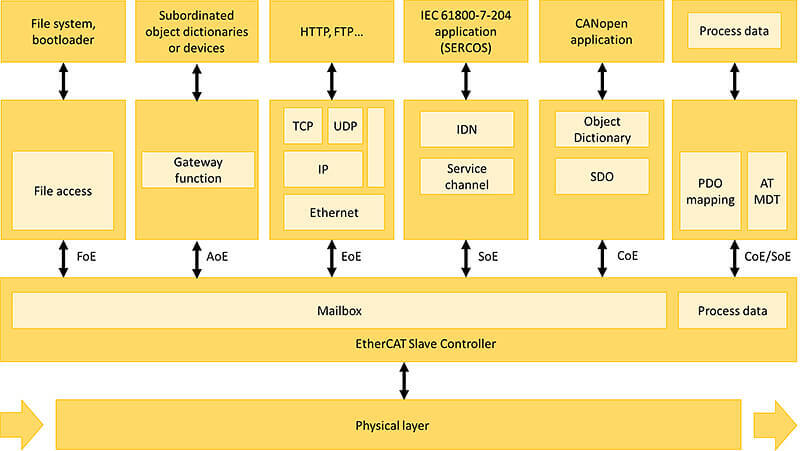
EtherCAT 통신 프로파일
EtherCAT은 슬레이브 장치를 구성하고 진단하는 데 유용할 수 있는 변수에 대한 비주기적 액세스를 지원합니다. 이 모드는 손상된 메시지를 자동으로 복구하는 사서함 기술을 사용합니다. EtherCAT은 여러 통신 프로필을 지원합니다.
- EtherCAT(CoE)을 통한 CAN 애플리케이션 프로토콜
- IEC 61800-7-204(SoE)에 따른 서보 드라이브 프로파일
- EoE(Ethernet over EtherCAT)
- EtherCAT을 통한 파일 액세스(FoE)
- EtherCAT을 통한 ADS(AoE)
EAP(EtherCAT Automation Protocol)를 통한 엔터프라이즈급 통신
전체 생산 관리 수준에서의 통신 요구 사항은 현장 수준의 통신 요구 사항과 약간 다릅니다. 개별 공장과 생산 라인 간에 정보를 전송해야 하는 경우가 많습니다. 또한 일반적으로 시스템에는 글로벌 수준에서 생산 프로세스를 관리하는 중앙 컨트롤러가 있어 작업을 개별 생산 라인에 분배합니다.
EAP(EtherCAT Automation Protocol)를 사용하여 엔터프라이즈 수준에서 서로 다른 장치를 상호 연결할 수 있습니다.
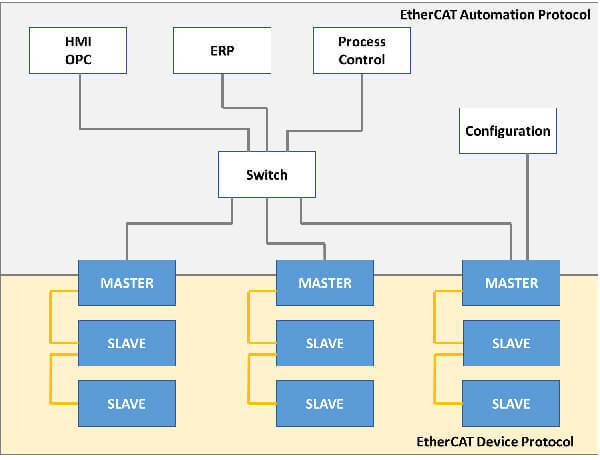
EAP 프로토콜은 다음 인터페이스 및 서비스를 정의합니다.
- 마스터 장치 간의 데이터 교환
- HMI(인간-기계 인터페이스)를 통한 데이터 교환
- EtherCAT 프로토콜 게이트웨이를 통해 다른 산업용 프로토콜로 트래픽 라우팅
- 장치 및 자동화 시스템 구성을 위한 소프트웨어 통합
EAP에 포함된 통신 프로토콜은 국제 IEC 61158 표준의 일부입니다. EAP는 이더넷을 무선 연결 옵션을 포함한 물리 계층으로 사용하여 반도체 제조 및 자동차 산업에서 자주 사용되는 자동 가이드 차량(AVG)에 사용할 수 있습니다. 산업.
EAP를 사용하면 푸시 및 폴링 모드에서 주기적인 데이터 교환을 수행할 수 있습니다. 푸시 모드에서 각 장치는 주기 시간(또는 이 시간의 배수)과 동일한 기간으로 데이터를 보냅니다.
각 장치는 특정 장치에서만 데이터를 수신하도록 구독할 수 있습니다. 보낸 사람과 받는 사람은 개체 사전을 사용하여 구성됩니다. 폴링 모드에서 각 디바이스는 다른 디바이스에 요청을 전송하고 이러한 각 디바이스는 요청에 응답합니다.
EAP의 순환 교환은 EtherType 필드에 식별자가 0x88A4 표준 이더넷 프레임의 사용을 기반으로 합니다. 이를 통해 자주 변경되는 데이터를 밀리초 주기로 전송할 수 있습니다. 서로 다른 네트워크 세그먼트에 있는 장치 간에 데이터 전송이 필요한 경우 TCP/IP 또는 UDP/IP 프로토콜을 사용할 수 있습니다.
또한 EAP를 사용하면 중요한 데이터 전송을 위해 Safety over EtherCAT 프로토콜을 사용할 수 있습니다. 개별 제어 장치가 동기식 비상 정지를 위해 중요한 데이터를 교환하거나 특정 라인 종료 시 다른 라인에 메시지를 전달해야 하는 생산 라인 제어 시스템에서 일반적으로 사용됩니다.
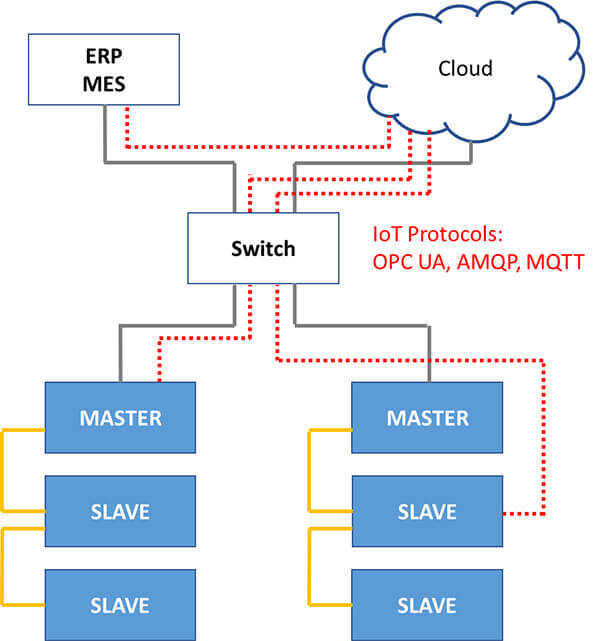
디지털화, 인더스트리 4.0 및 IoT에 EtherCAT 적용
EtherCAT은 성능, 유연성 및 개방성으로 디지털화 트렌드의 높은 요구 사항을 충족합니다. EtherCAT은 필드 레벨뿐만 아니라 클라우드 서비스에 연결하는 데에도 사용할 수 있습니다.
마스터 및 슬레이브 장치를 재구성할 필요 없이 클라우드 서비스에 연결하기 위해 EtherCAT은 마스터의 메일함에 액세스하여 모든 데이터에 액세스할 수 있는 통신 게이트웨이를 사용합니다. 통신 게이트웨이는 TCP/IP 또는 UDP/IP를 통해 EtherCAT 마스터와 통신하는 독립형 장치일 수도 있고, 마스터 장치 자체의 애플리케이션일 수도 있습니다.
또한 프로토콜의 개방성을 통해 OPC UA, MQTT, AMQP 등과 같은 IT 프로토콜을 마스터 장치 측면 또는 슬레이브 장치에 직접 통합하여 단일 프로토콜을 사용하여 센서에서 클라우드 서비스로 직접 데이터를 전송할 수 있습니다.
EtherCAT은 TSN IEEE 802.1(Time-Sensitive Networking) 네트워크에서 작동할 수 있으므로 실시간 데이터 전송으로 컨트롤러 간의 교환을 구성할 수 있습니다. 또한 EtherCAT은 M2M(Machine-to-Machine) 통신 및 클라우드 서비스와의 통신에 사용할 수 있는 OPC UA Pub-Sub 프로토콜과의 통합을 지원합니다.
'데이터계측분석 > 데이터통신 기술자료' 카테고리의 다른 글
| UART 통신 프로토콜 (0) | 2023.09.16 |
|---|---|
| CANOpen 네트워크 토폴로지 (0) | 2023.09.10 |
| RS-232, RS-422, RS-485의 차이점 (0) | 2023.05.12 |
| RS-232 통신 프로토콜 (0) | 2023.05.11 |
| 시리얼통신의 동기식/비동기식 프로토콜 (0) | 2023.05.11 |