엔코더 및 애플리케이션 개요
엔코더는 동작이나 위치를 측정할 수 있는 전자 기계 장치입니다.
대부분의 엔코더는 광학 센서를 사용하여 펄스 트레인의 형태로 전기 신호를 제공하며, 이는 모션, 방향 또는 위치로 변환 될 수 있습니다.
로터리 엔코더는 샤프트의 회전 운동을 측정하는데 사용됩니다.
그림 1은 LED(Light-Emitting Diode), 디스크 및 디스크 반대쪽에 있는 광 감지기로 구성된 회전식 엔코더의 기본 구성 요소를 보여줍니다. 회전축에 장착된 디스크에는 디스크에 코딩된 불투명하고 투명한 섹터 패턴이 있습니다. 디스크가 회전하면 불투명 부분이 빛을 차단하고 유리가 투명한 곳에서는 빛이 통과 할 수 있습니다.
이것은 구형파 펄스를 생성하여 위치 또는 모션으로 해석할 수 있습니다.
엔코더는 일반적으로 회전당 100~6,000개의 세그먼트를 가지고 있습니다. 즉, 세그먼트가 100개인 엔코더는 3.6도 해상도를 제공하고 6,000개 세그먼트가 있는 엔코더는 0.06도 해상도를 제공할 수 있습니다.
선형 엔코더는 회전하는 디스크 대신 표면을 따라 투명한 슬릿이 있는 고정 된 불투명 스트립이 있고 LED 감지기 어셈블리가 움직이는 몸체에 부착된다는 점을 제외하고는 회전식 엔코더와 동일한 원리로 작동합니다.
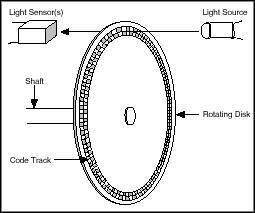
그림 1. 광학 엔코더 구성 요소
한 세트의 펄스가 있는 엔코더는 회전 방향을 표시 할 수 없기 때문에 유용하지 않습니다.
90도 위상이 다른 섹터가 있는 두 개의 코드 트랙을 사용하여 (그림 2), 구적 엔코더의 두 출력 채널은 위치와 회전 방향을 모두 나타냅니다. 예를 들어 A가 B를 앞서면 디스크가 시계 방향으로 회전합니다.
B가 A를 앞서면 디스크가 시계 반대 방향으로 회전합니다.
따라서 펄스 수와 신호 A와 B의 상대 위상을 모두 모니터링하여 회전 위치와 방향을 모두 추적할 수 있습니다.
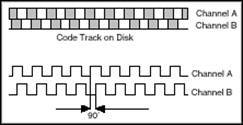
그림 2. 구적 엔코더 A 및 B 출력 신호
또한 일부 구적 엔코더에는 회전당 단일 펄스를 제공하는 제로 또는 기준 신호라고 하는 세 번째 출력 채널이 포함되어 있습니다. 이 단일 펄스를 사용하여 기준 위치를 정확하게 결정할 수 있습니다.
대부분의 엔코더에서 이 신호를 Z-터미널 또는 인덱스라고합니다.
지금까지 이 문서는 단일 종단 증분 구적 엔코더에 대해서만 다루었습니다.
A 및 B 신호가 모두 접지를 참조하므로 신호당 하나의 와이어 (또는 끝단)가 있으므로 이를 단일 종단이라고 합니다.
일반적으로 사용되는 또 다른 유형의 엔코더는 차동 엔코더로, 각 A 및 B 신호당 두 개의 라인이 있습니다.
A 신호의 두 라인은 A'와 A이고, B 신호의 두 라인은 B'와 B입니다.
이 유형의 구성은 모든 네 라인에서 항상 알려진 전압(0V 또는 Vcc)을 공급하기 때문에 푸시 풀이라고도합니다.
A가 Vcc이면 A'는 0V이고 A가 0V이면 A'는 Vcc입니다. 단일 종단 엔코더의 경우 A는 Vcc이거나 부동신호입니다.
차동 측정을 수행하면 신호의 무결성을 지킬 수 있기 때문에 차동 엔코더는 전기 노이즈가 많은 환경에서 자주 사용됩니다.
증분 엔코더를 사용하면 속도와 가속도를 결정할 수 있는 위치의 변화만 측정 할 수 있지만 물체의 절대 위치를 결정할 수는 없습니다. 앱솔루드 엔코더라고 하는 세 번째 유형의 엔코더는 물체의 절대 위치를 결정할 수 있습니다.
이 유형의 엔코더는 증분 엔코더와 같이 불투명하고 투명한 세그먼트가 번갈아가며 있지만 앱솔루트 엔코더는 표적이나 다트 보드의 과녁처럼 엔코더 휠에 동심원을 형성하는 여러 세그먼트 그룹을 사용합니다.
동심원은 엔코더 휠의 중앙에서 시작하며 바깥쪽으로 갈 수록 각각 이전 내부 링보다 두 배의 세그먼트 수를 갖습니다.
가장 안쪽의 링인 첫 번째 링에는 하나의 투명 세그먼트와 하나의 불투명 세그먼트가 있습니다.
가운데에서 나오는 두 번째 링에는 두 개의 투명 세그먼트와 두 개의 불투명 세그먼트가 있고 세 번째 링에는 각각 네 개의 세그먼트가 있습니다. 엔코더에 10 개의 링이 있고 가장 바깥쪽에있는 링에는 512 개의 세그먼트가 있고 16 개의 링이있는 경우 가장 바깥쪽에있는 링에는 32,767 개의 세그먼트가 있습니다.
앱솔루트 엔코더의 각 링은 이전 링의 세그먼트 수의 두 배를 갖기 때문에 값은 이진 카운팅 시스템의 숫자를 형성합니다. 이 유형의 엔코더에는 엔코더 휠의 모든 링에 대한 광원과 수신기가 있습니다.
즉, 링이 10 개인 엔코더에는 10 세트의 광원과 수신기가 있고 16 개의 링이있는 엔코더에는 16 개의 광원과 수신기가 있습니다.
앱솔루트 엔코더의 장점은 엔코더 휠이 기계 이동의 전체 길이 동안 1번 회전할 수 있도록 감속할 수 있다는 것입니다.
기계 이동 길이가 10 인치이고 엔코더의 분해능이 16 비트 인 경우 기계의 분해능은 10/65,536 (0.00015 인치)입니다.
기계 이동이 6 피트와 같이 더 길면 코스 리졸버(Coarse resolver)는 각 이동 피트를 추적 할 수 있으며, 파인 리졸버라고 하는 두번째 리졸버는 1피트 이내의 위치를 추적할 수 있습니다.
즉, 전체 6피트 거리와 기어에 대해 한 바퀴 회전하도록 코스 엔코더(Coarse Encoder)를 조정하고, 파인 엔코더는 전체 해상도가 1피트(12인치)에 분산되도록 맞춘다는 뜻입니다.
엔코더 측정 방법
엔코더 측정을 수행하려면 카운터라고 하는 기본 전자 부품이 필요합니다.
여러 입력을 기반으로 기본 카운터는 카운트된 에지 수(파형의 로우에서 하이로 전환)를 나타내는 값을 반환합니다.
대부분의 카운터에는 게이트, 소스 및 업/다운의 세 가지 관련 입력이 있습니다.
카운터는 소스 입력에 등록 된 이벤트를 카운트하고, 업/다운 라인의 상태에 따라 카운트를 증가 시키거나 감소시킵니다. 예를 들어, 업/다운 라인이 "하이"이면 카운터는 카운트를 증가시키고 "로우"이면 카운터는 카운트를 감소시킵니다.
그림 3은 단순화된 카운터를 보여줍니다.

그림 3. 카운터의 단순화 모델
엔코더에는 일반적으로 기기에 연결하는 데 필요한 5개의 와이어가 있으며 엔코더에 따라 이러한 와이어의 색상이 다릅니다. 이 와이어를 사용하여 엔코더에 전원을 공급하고 A, B 및 Z 신호를 읽을 수 있습니다.
그림 4는 증분형 엔코더의 일반적인 핀아웃 테이블을 보여줍니다.
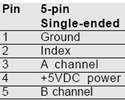
그림 4. 증분 엔코더 핀아웃
다음 단계는 이러한 각 와이어를 연결할 위치를 결정하는 것입니다.
위에서 설명한 카운터를 고려하면 신호 A가 소스 단자에 연결되어 펄스가 계산되는 신호가 됩니다.
신호 B는 업/다운 터미널에 연결되며 +5 VDC 및 접지 신호를 전원에 연결할 수 있습니다.
대부분의 경우 데이터 수집 장치 카드의 디지털 라인이면 충분합니다.
엣지가 카운팅되면, 고려해야 할 다음 개념은 해당 값이 위치로 변환되는 방법입니다.
에지 카운트가 위치로 변환되는 프로세스는 사용되는 인코딩 유형에 따라 다릅니다.
인코딩에는 X1, X2 및 X4의 세 가지 기본 유형이 있습니다.
X1 인코딩
그림 5는 구적주기와 그에 따른 X1 인코딩의 증가 및 감소를 보여줍니다. 채널 A가 채널 B를 앞서면 채널 A의 상승 에지에서 증가가 발생합니다. 채널 B가 채널 A를 앞서면 채널 A의 하강 에지에서 감소가 발생합니다.
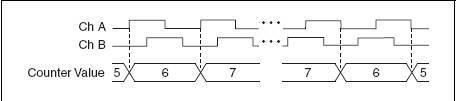
그림 5. X1 인코딩
X2 인코딩
채널 A의 각 에지에서 카운터가 증가하거나 감소하는 점을 제외하면 X2 인코딩에서도 동일한 동작이 유지됩니다. 각 주기는 그림 6과 같이 두 번의 증가 또는 감소를 발생시킵니다.
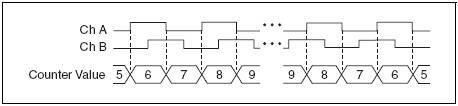
그림 6 . X2 인코딩
X4 인코딩
카운터는 X4 인코딩의 경우 채널 A 및 B의 각 가장자리에서 유사하게 증가 또는 감소합니다.
카운터의 증가 또는 감소 여부는 어느 채널이 다른 채널을 이끄는지에 따라 다릅니다.
그림 7과 같이 각 주기는 4개의 증가 또는 감소를 발생시킵니다.
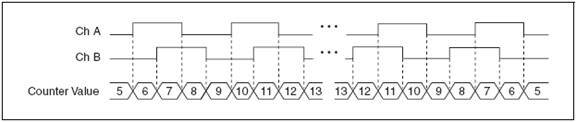
그림 7. X4 인코딩
인코딩 유형을 설정하고 펄스를 계산했으면 다음 공식 중 하나를 사용하여 위치로 변환하면됩니다.
회전 위치의 경우
회 전량은
여기서 N = 샤프트 매 회전당 엔코더에 의해 생성된 펄스 수
x = 인코딩 유형
선형 위치의 경우
변위량은
여기서 PPI = 인치당 펄스 수 (각 엔코더에 특정한 매개 변수)
엔코더를 계측기에 연결
이 섹션에서는 NI cDAQ-9178 섀시와 NI 9401 C 시리즈 디지털 I/O 모듈을 사용하는 예를 다룹니다.
다른 측정 기기나 장치를 사용할 때에도 절차는 비슷합니다.

그림 8. NI cDAQ-9178 섀시 및 NI 9401 디지털 I / O 모듈
필요한 장비 :
NI CompactDAQ 섀시
NI 9401 8 채널, 5V/TTL 고속 양방향 디지털 I/O 모듈
24 pulse/rev 회전 구적 엔코더
NI 9401에는 8개의 디지털 채널에 대한 연결을 제공하는 DSUB 커넥터가 있습니다.
각 채널에는 디지털 입력 또는 출력 장치를 연결할 수있는 디지털 I/O 핀이 있습니다.
CompactDAQ 섀시의 4개 카운터에 대한 액세스는 섀시의 모든 슬롯에서 사용할 수 있습니다.
cDAQ-9172를 사용하는 경우 2 개의 카운터에 대한 액세스는 슬롯 5와 6을 통해서만 가능하므로 슬롯 5에 9401을 삽입하십시오. 그림 9는이 구성에 대한 핀아웃을 보여주고 표 1은 기본 카운터 터미널을 보여줍니다.
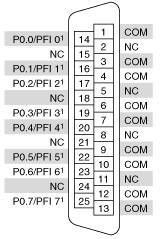
그림 9. NI 9401 핀아웃 (슬롯 5)
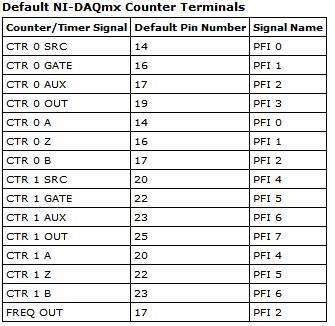
표 1. 기본 카운터 터미널
이 사양에 따르면 와이어 A는 핀 14에 연결되고, 와이어 B는 핀 17에 연결되고, "5 VDC Power"는 "high"으로 설정된 사용하지 않는 임의의 디지털 라인에 연결되며, "Ground"는 COM 터미널에 연결됩니다.
측정하기
엔코더를 측정 디바이스에 연결 했으므로 이제 NI LabVIEW 그래픽 프로그래밍 소프트웨어를 사용하여 시각화 및 분석을 위해 데이터를 컴퓨터로 전송할 수 있습니다.
표 1은 LabVIEW 프로그래밍 환경 내에서 에지 카운트와 해당 위치 증분을 표시하는 예를 보여줍니다.
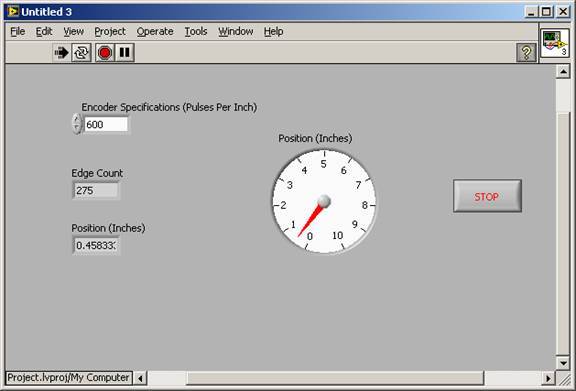
그림 10. 측정을 보여주는 LabVIEW 프런트 패널
'데이터계측분석 > 데이터계측 기술자료' 카테고리의 다른 글
| NI DAQ와 LabVIEW로 열전쌍 측정 수행하기 (0) | 2023.02.04 |
|---|---|
| NI DAQ 로드 셀 또는 압력 트랜스듀서 측정 방법 (0) | 2023.02.04 |
| NI 다기능 I/O DAQ 스펙 용어 설명 (0) | 2023.02.03 |
| 측정 시스템에 적합한 DAQ 하드웨어를 선택하는 방법 (0) | 2023.02.03 |
| DAQ 브리지 기반 센서로 로드 및 토크 측정 (0) | 2023.02.02 |