전기 및 전자 공학에서 로봇 설계, 자동화 시스템, 제어, 서보 모터 및 스테퍼 모터는 매우 중요한 역할을 합니다. 서보 모터와 스테퍼 모터의 차이점에 대해 알아보겠습니다.

1. 구조
1) 서보 모터는 DC 모터, 기어 메커니즘, 위치 센서 및 제어 회로의 네 가지 구조로 구성됩니다.
2. 동작
1) 스테퍼 모터 작동
스테퍼 모터의 작동 및 제어는 복잡합니다. 스테퍼는 4개 이상의 단자에서 최대 8개의 단자를 가지고 있으며 샤프트 회전의 필요한 위치에 따라 각 전자석에 개별적으로 전원을 공급해야 하기 때문에 스테퍼를 작동하려면 외부 컨트롤러(마이크로 프로세서)와 모터 드라이버가 필요합니다. 스테퍼는 최대 360도까지 회전할 수 있습니다.
서보 모터의 작동은 스테퍼 모터보다 간단합니다. 서보 모터는 360도 회전할 수 없으며 최대 180도까지만 회전합니다. 서보 모터를 제어하는 데 필요한 외부 컨트롤러 회로 또는 마이크로 프로세서 회로가 없습니다. PWM(펄스 폭 변조) 신호만 작동하면 충분합니다.
서보 모터에는 전원, 접지 및 제어의 세 가지 단자가 있습니다. 서보 모터에 전원이 전원단자와 접지단자를 통해 연속적으로 공급되고, PWM 신호는 '제어 단자'에 인가되어 모터축의 회전 위치를 제어합니다. 펄스 신호를 조정하여 샤프트의 정확한 위치를 얻을 수 있습니다.
3. 특징과 장점
1. 토크: 서보 모터는 스테퍼 모터보다 높은 토크와 시간 의존적 피크 토크를 제공할 수 있습니다. 서보 모터의 또 다른 장점은 요구 사항에 따라 토크를 제어할 수 있다는 것입니다.
반면에 스테퍼 모터는 속도가 증가하면 토크가 감소한 매우 낮은 속도로 작동할 때 높은 토크를 제공할 수도 있습니다. 스테퍼가 작동 할 때마다 높은 토크로만 작동하므로 스테퍼 모터의 토크를 제어 할 수 없습니다.
2. 속도: 자동 귀환 제어 장치 모터는 고속 신청을 위해 특별히 디자인됩니다. 180도 회전할 수 있으며 스테퍼 모터보다 훨씬 빠른 속도를 제공합니다. 서보 모터는 또한 스테퍼 모터보다 더 높은 가속도를 제공합니다.
스테퍼 모터는 주로 다중 스테핑과 정확한 위치 지정을 위해 설계되었으며 고속을 제공 할 수 없습니다.
3. 스테핑 : 스테퍼 모터는 다중 스테핑, 마이크로 스테핑 및 낮은 관성으로 정확한 위치 지정에 가장 적합합니다. 스테퍼 모터에는 극이 없기 때문에 스테핑과 관련된 모든 기능을 제공 할 수 있습니다. 반면에 서보 모터는 스테퍼 모터와 같은 다중 스테핑, 마이크로 스테핑을 제공할 수 없습니다.
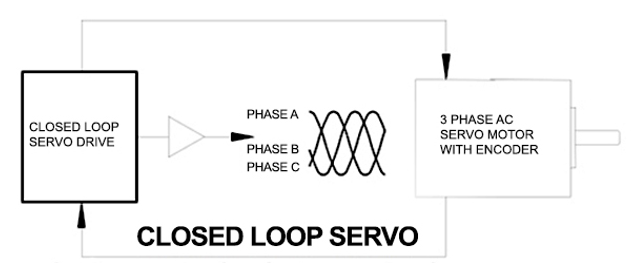
4. 루프 기능 : 서보 모터는 폐쇄 루프 시스템에서 작동합니다. 서보 모터의 이러한 기능으로 쉽게 제어할 수 있습니다. 요구 사항에 따라 서보를 제어하거나 작동하기 위해 PWM 신호가 필요했습니다. 실제로 '서보'라는 용어는 폐쇄 루프 시스템을 나타냅니다.
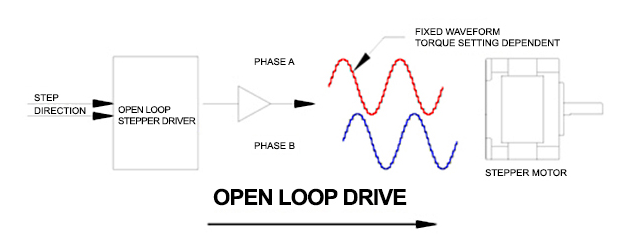
반면에 스테퍼 모터는 개방 루프 시스템에서 작동하므로 작동 및 제어가 어렵습니다. 스테퍼 모터를 작동하려면 모터 드라이버와 마이크로 컨트롤러가 필요합니다.
5. 응용분야: 자동 귀환 제어 장치 모터는 높은 토크, 보유 및 폴링 신청을 위해 사용됩니다. 예를 들어, 공작 기계, 액추에이터, 제어 시스템은 서보 모터로 사용됩니다.
반면에 스테퍼 모터는 부드러운 제어 작동, 정확한 위치 지정, 마이크로 스테핑 응용 분야에 사용됩니다. 예시 - 로보틱스 애플리케이션, 감시 제품, 카메라 등
4. 요약
적절하게 적용되면 스테퍼 모터와 서보 모터 모두 매우 효과적인 시스템에 안정적인 전력을 제공할 수 있습니다. 고려해야 할 사항이 많으며 가장 중요한 것은 비용, 토크, 효율성, 속도 및 회로입니다.
일정한 부하와 상대적으로 낮은 정확도 요구 사항이 있는 응용 분야의 경우 스테퍼 모터가 더 적합합니다. 스테퍼 모터는 또한 서보 모터에 비해 더 작고 저렴한 경향이 있습니다.
고속 및 고속 가속도가 필요한 시스템과 다양한 부하가 있는 응용 분야의 경우 서보 모터가 더 적합한 옵션입니다. 생산 시설에서 연속 사용 가능하도록 설계되었습니다.
응용 프로그램이 예산에 맞는 경우 스테퍼 모터를 고려하십시오. 그러나 성능이 더 중요한 측면이고 비용이 문제가 되지 않는다면 서보 모터를 선택하십시오.
1) 서보 모터의 장점:
- 더 높은 효율성
- 더 높은 출력 전력
- 폐쇄 루프 제어
- 조용한
- 더 신뢰할 수 있는
- 더 높은 가속
- 더 나은 고속 성능
- 토크 제어
- 더 부드러운 주행
- 더 높은 정확도
- 다양한 하중 응용 분야에 더 적합
2) 스테퍼 모터의 장점:
- 비용 절감
- 더 높은 유지 토크(동력)
- 멈춤쇠 토크(전원이 없을 때)
- 더 높은 저속 토크
- 튜닝 불필요
- 낮은 유지 보수
- 더 쉬운 설정 및 설치
- 일정한 토크
- 좋은 반복성
- 기계적 과부하로 인한 손상 없음
- 일정한 하중 응용 분야에 적합
| 서보 모터 | 스테퍼 모터 |
| 폐쇄 루프 시스템에서 작동합니다. | 개방 루프 시스템에서 작동합니다. |
| 최대 180도까지 회전할 수 있습니다. | 최대 360도까지 실행할 수 있습니다. |
| 고속 응용 분야에 가장 적합 | 저속 응용 분야에 가장 적합 |
| 우리는 그것의 토크를 통제할 수 있습니다 | 우리는 그 토크를 제어 할 수 없습니다 |
| 사냥 문제 및 정지 위치에서 높은 관성 | 사냥 문제 없음 및 정지 위치에서 낮은 관성 |
| 4개에서 8개의 숫자가 있습니다 | 그것에는 극 50에서 100의 수가 있습니다 |
| 정확한 포지셔닝 및 마이크로 스테핑에는 적합하지 않습니다. | 정확한 포지셔닝 및 마이크로 스테핑에 가장 적합 |
| 수직 하중, 높은 토크 및 속도 응용 분야에 가장 적합 | 원활한 작동, 정확한 포지셔닝 응용 분야에 가장 적합 |
'데이터계측분석 > 전기전자 기술자료' 카테고리의 다른 글
| 전자파 적합성 테스트의 이해 (0) | 2024.07.22 |
|---|---|
| 멀티미터를 이용하여 다이오드 테스트하는 방법 (0) | 2024.07.22 |
| USB C타입 핀아웃 및 기능 (0) | 2024.07.20 |
| IGBT 기호, 회로 및 특성 (0) | 2024.07.19 |
| 커패시터 전압 정격의 의미와 사양 (0) | 2024.07.18 |