모션 제어 응용 프로그램의 엔코더를 선택할 때 여러 가지 선택을 해야 합니다. 센서를 지정하는 엔지니어는 응용 프로그램에 증분 엔코더, 절대 엔코더 또는 정류 엔코더가 필요한지 결정해야 합니다. 어떤 유형이 필요한지 알게 되면 해상도, 장착 패턴, 모터 축 크기 등을 고려해야 할 다른 매개 변수의 목록이 있습니다.
엔코더의 세 가지 주요 출력 유형인 오픈 컬렉터, 푸시 풀 및 차동 라인 드라이버입니다. 증분 엔코더의 직교 출력, 정류 엔코더의 모터폴 출력, 특정 프로토콜을 사용하는 직렬 인터페이스 등 모든 신호는 디지털이며 하이 및 로우 상태입니다. 이는 5V 엔코더의 경우 신호가 항상 로우인 0V(접지)와 하이 또는 바이너리 1인 5V 사이에서 전환된다는 것을 의미합니다.

1. Open-Collector 출력
대부분의 로터리 엔코더는 오픈 컬렉터 출력을 가질 것입니다. 이는 디지털 신호의 출력이 접지로 낮게 구동될 수 있음을 의미하며, 신호가 높다고 가정될 때 출력은 단순히 분리됩니다. 출력 값을 오픈 컬렉터라고 부르는 이유는 입력 신호가 높을 때 트랜지스터의 컬렉터 핀이 열린 상태로 유지되거나 연결이 끊어지기 때문입니다.
이 장치와 인터페이스하려면 컬렉터를 원하는 고전압 레벨로 "풀업"하기 위해 외부 저항이 필요합니다. 이는 엔지니어가 전압 레벨이 다른 시스템과 인터페이스하려고 할 때 유용한 출력 유형입니다. 컬렉터는 엔코더가 작동하는 것보다 낮거나 더 높은 전압 수준을 충족하도록 끌어올릴 수 있습니다.
그러나 이 인터페이스의 단점은 종종 엔코더 전압 레벨을 변경하는 기능보다 큽니다. 오픈 컬렉터 엔코더에 외부 저항기를 추가하는 것은 그리 어렵지 않으며 많은 상용 컨트롤러에 이미 내장되어 있지만 이러한 외부 저항기는 작동하는 데 전류를 소비하고 출력 신호에 영향을 주어 주파수에 따라 특성을 변경합니다.
증분형 엔코더의 구형파를 다시 생각해 보면, 디지털 신호가 낮은 신호에서 높은 신호로 즉시 전환된다고 생각하고 싶지만 물론 모든 것에는 시간이 걸리는데 이 시간 지연을 슬루율이라고 합니다.
오픈 컬렉터 출력의 경우, 슬루율은 풀업 저항의 저항에 영향을 받는데, 이는 저항이 RC 타이밍 회로에서 R 역할을 하기 때문입니다. 슬루율이 낮다는 것은 엔코더의 작동 속도가 느려짐을 의미합니다(증분형 엔코더의 경우 분해능이 감소함).
슬루율은 더 낮은 값의 저항기(더 강한 풀업)로 개선할 수 있지만, 신호가 낮을 때 풀업 저항기가 더 많은 전류를 끌어와야 하기 때문에 시스템이 더 많은 전력을 소비한다는 것을 의미합니다.
2. Push-Pull 출력
오픈 컬렉터 인터페이스의 단점에 대한 가장 좋은 방법은 푸시-풀 구성입니다. 푸시-풀에서는 하나가 아닌 두 개의 트랜지스터가 사용됩니다. 상부 트랜지스터는 액티브 풀업(active pull-up)으로 작동하는 반면, 하부 트랜지스터는 오픈 컬렉터 구성에서 트랜지스터와 동일하게 작동합니다.
푸시-풀 구성은 신호 라인을 컨디셔닝하는 저항기로 달성할 수 있는 것보다 더 빠른 슬루율로 빠른 디지털 전환을 허용합니다. 전력을 방출하는 역할을 하는 저항이 없으면 이 출력 유형은 전력 사용량도 더 낮습니다. 따라서 푸시풀 출력은 사용 가능한 전력이 중요한 배터리 구동식 응용 제품에 훨씬 더 나은 옵션입니다.
3. 차동 라인 드라이버 출력
푸시-풀 엔코더는 이전 오픈 컬렉터에 비해 성능이 향상되었지만, 단일 종단 출력으로 인해 모든 프로젝트에 반드시 적합한 옵션은 아닙니다. 응용 분야에서 긴 케이블 연결 거리가 필요하거나 사용되는 케이블이 많은 양의 전기 노이즈 및 간섭을 받는 경우 차동 라인 드라이버 출력이 있는 엔코더가 최선의 선택이 될 것입니다.
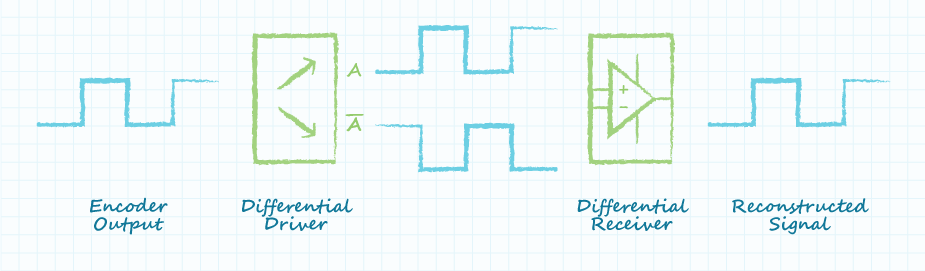
차동 출력은 푸시-풀 출력과 동일한 트랜지스터 구성으로 생성되지만, 하나의 신호가 생성되는 것이 아니라 두 개의 신호가 생성됩니다. 이러한 신호를 차동 쌍이라고 합니다. 신호 중 하나는 원래 신호와 일치하고 다른 하나는 원래 신호와 정확히 반대이기 때문에 보완 신호라고도 합니다.
단일 종단 출력에서 수신기는 항상 전송된 신호를 공통 접지로 참조합니다. 그러나 전압이 떨어지고 슬루율이 감소하는 경향이 있는 긴 케이블링 거리에서는 신호 오류가 자주 발생합니다. 차동 애플리케이션에서 호스트는 원래의 단일 종단 신호를 생성하고, 이 신호는 차동 송신기로 이동합니다.
이 송신기는 케이블을 통해 전송될 차동 쌍을 생성합니다. 두 개의 신호가 생성되면 수신기는 더 이상 전압 레벨을 접지에 참조하지 않고 대신 신호를 서로 참조합니다. 이는 수신기가 특정 전압 레벨을 찾는 대신 항상 두 신호 간의 차이를 보고 있음을 의미합니다.
그런 다음 차동 수신기는 한 쌍의 신호를 호스트에 필요한 적절한 로직 레벨을 사용하여 호스트 장치에서 해석할 수 있는 하나의 단일 종단 신호로 다시 재구성합니다. 또한 이러한 유형의 인터페이스를 사용하면 전압 레벨이 다른 장치가 차동 트랜시버 간의 통신을 통해 함께 작동할 수 있습니다. 이 모든 것이 함께 작동하여 긴 케이블 연결 거리에서 단일 종단 애플리케이션에서 발생할 수 있는 신호 저하를 극복합니다.
그러나 신호 저하가 긴 케이블 연결 거리에서 발생하는 유일한 문제는 아닙니다. 시스템 내에서 케이블이 오래 사용될수록 전기 노이즈와 간섭이 케이블과 궁극적으로 전기 시스템으로 들어갈 가능성이 높아집니다. 노이즈가 케이블에 결합되면 다양한 크기의 전압으로 나타납니다.
싱글 엔드 출력 엔코더가 있는 시스템에서는 이로 인해 시스템의 수신 측이 잘못된 하이 및 로우 로직 값을 읽어 잘못된 위치 데이터가 발생할 수 있습니다. 차동 라인 드라이버 인터페이스는 이러한 노이즈를 처리할 수 있는 잘 갖추어져 있습니다.
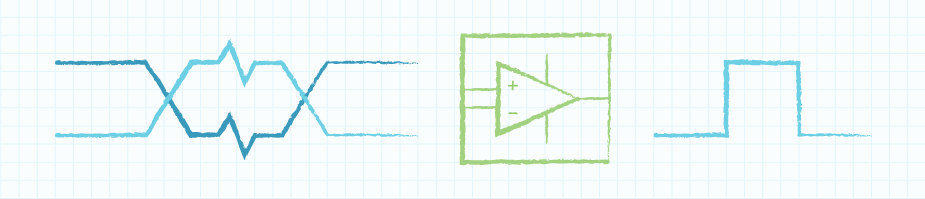
차동 라인 드라이버를 사용할 때는 트위스트 페어 케이블링이 필요합니다. 트위스트 페어 케이블링은 주어진 거리에서 지정된 권선 수와 함께 얽힌 A 및 A- 신호로 구성됩니다. 이러한 유형의 케이블을 사용하면 하나의 신호 와이어에서 생성된 노이즈가 페어링된 와이어에 동일하게 적용됩니다.
신호 A에서 전압 스파이크가 발생하면 신호 A-에도 동일하게 적용됩니다. 차동 수신기는 재구성된 신호를 얻기 위해 서로의 신호를 빼기 때문에 두 전선에 동일하게 표시되는 잡음을 무시합니다. 차동 수신기가 두 신호 라인에서 동일한 전압을 무시할 수 있는 기능을 공통 모드 제거라고 합니다. 잡음 제거 기능 때문에 차동 라인 드라이버 인터페이스는 산업 및 자동차 응용 분야에서 일반적입니다.
'데이터계측분석 > 센서 기술자료' 카테고리의 다른 글
| K타입 열전대 구성, 사양과 온도범위 (0) | 2024.08.08 |
|---|---|
| 구적 엔코더의 동작방식 (0) | 2024.08.01 |
| 4-20mA 아날로그 전류 신호 (0) | 2024.07.24 |
| 압전 가속도센서의 기초 (0) | 2024.07.23 |
| 가속도센서 사양의 이해 (0) | 2024.07.16 |