구적 엔코더는 출력 신호가 구형파 형태로 표시되는 증분형 센서이며 각도 회전 측정에 가장 일반적으로 사용되는 장치입니다.

1. 구적 엔코더 신호
로터리 센서에는 샤프트에 부착된 디스크(휠)가 있습니다. 휠에는 특별한 표시는 접촉 영역의 표면에 있습니다. 이러한 라벨은 투명하며 그 사이의 디스크 표면은 침투할 수 없는 재료로 만들어집니다.

리니어 구적 엔코더의 경우, 스케일이 측정 디스크를 대체합니다. 특수 리더(슬라이더)가 이를 따라 이동하며 주요 작동 원리는 모두 동일하게 유지됩니다.
광선 형태의 구적 엔코더 펄스는 소스에서 나오며 반대 유형의 표면(단체 또는 불투명)에 따라 수신기(감지기)로 떨어지거나 떨어지지 않습니다.
구적 증분형 엔코더에는 이 프로세스가 발생하는 디스크에 두 개의 개별 핀이 있습니다. 신호 감지기처럼 작동하는 감지 채널이 있습니다. 일반적으로 채널 A와 채널 B라고 합니다. 이 지점에는 별도의 입력과 배선이 있습니다. 따라서 장치에는 특정 순간에 두 개의 신호 수신기가 있습니다.
증분 측정에는 시작점도 필요합니다. 따라서 시작(영) 위치를 표시하는 Z 채널이 있습니다.
빛이 투명한 표시에 닿는지 불투명한 표면에 닿는지에 따라 수신기는 신호를 캡처하거나 캡처하지 않습니다. 이것은 구형파라고도 하는 직사각형 형태의 두 개의 다이어그램으로 그래픽으로 나타낼 수 있습니다.
2. 직교 인코딩
로터리 구적 엔코더는 디지털 IC(집적 회로)이므로 바이너리 코드를 사용합니다. 구형파는 하이(1) 및 로우(0) 상태에서 디지털 신호를 표시합니다. 바이너리 코드는 인터페이스(예: USB) 및 프로토콜을 통해 시스템을 제어하기 위해 데이터를 전송하는 데 필요합니다.
3. 위치와 속도
전체 디스크 회전당 펄스 수는 표면의 마크 수에 따라 다릅니다. 이 원칙은 엔코더 분해능의 기본 정의입니다. 따라서 두 개의 출력 신호는 특정 시간 동안의 펄스 수를 특성화합니다. 이러한 값을 사용하여 제어 시스템은 각속도, 거리 및 가속도를 결정할 수 있습니다.

4. 방향
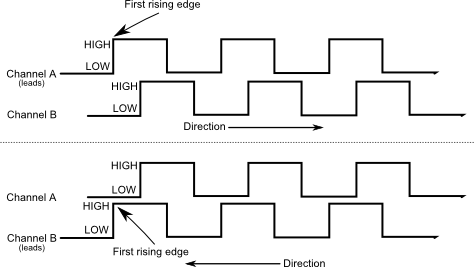
휠은 양방향으로 회전할 수 있습니다. 회전 방향을 알기 위해서는 하나가 아닌 두 개의 점과 두 개의 선이 필요하며 두 핀이 순서대로 배치되어 있습니다.
출력 채널 A와 B는 그래프의 위상이 90도 이동하도록 특정 거리에서 디스크에 특별히 배치됩니다. 주기는 또한 계산의 용이성을 위해 4개의 동일한 부분으로 나뉩니다. 이러한 각 부분에서 서로 고유한 위치에 있어 방향을 파악할 수 있습니다 .

인코더가 전진(시계 방향)으로 이동하면 라인 A는 가장 높은 지점(1)에 있고 채널 B는 가장 낮은 지점(0)에 있습니다. 1과 0의 조합을 얻습니다. 다음은 11, 00 등입니다.
같은 지점에서 다른 방향(시계 반대 방향)으로 시작하면 먼저 선이 가장 높은 지점(11)에 있고 그 다음 조합이 01,00 등임을 알 수 있습니다.
구적 엔코더 인터페이스(QEI) 덕분에 각 기간의 포인트 차이를 비교하여 숫자 조합이 수신되는 순서를 나타내는 고유 코드를 얻습니다. 마이크로 컨트롤러 또는 위치 카운터는 이러한 데이터를 분석하여 디스크가 회전하는 방향을 결정할 수 있습니다.
디코딩 후 이러한 정보는 제어 시스템에 입력되거나 디스플레이에 일반적인 형식으로 표시됩니다. 제시된 시스템은 가장 간단한 시스템 중 하나입니다.
'데이터계측분석 > 센서 기술자료' 카테고리의 다른 글
| 초음파센서(HC-SR04) 사양 및 동작방식 (0) | 2024.08.10 |
|---|---|
| K타입 열전대 구성, 사양과 온도범위 (0) | 2024.08.08 |
| 엔코더의 출력신호 유형 (0) | 2024.07.31 |
| 4-20mA 아날로그 전류 신호 (0) | 2024.07.24 |
| 압전 가속도센서의 기초 (0) | 2024.07.23 |