진동 측정
진동은 다양한 파라미터를 포함하는 복잡한 측정입니다.
진동은 중심 정적 위치 주위의 물체의 시간 기반(주기적/주기적) 변위입니다. 다음과 같은 기여 요인은 진동의 크기 및 속도와 복잡한 관계가 있습니다.
- 물체 자체의 고유 진동수와 강성
- 진동을 유도하는 외부 에너지원의 진폭과 주파수
- 진동 에너지원과 관심 대상 사이의 결합 메커니즘
진동 측정은 변위, 속도, 가속도 및 주파수와 같은 많은 구성 요소 때문에 복잡합니다. 또한 이러한 각 구성 요소는 피크 대 피크, 피크, 평균, RMS와 같은 다양한 방식으로 측정할 수 있습니다.
각각은 시간 영역(오실로스코프 또는 데이터 수집 시스템을 사용한 실시간, 순간 측정) 또는 주파수 영역(주파수 스펙트럼에 걸쳐 서로 다른 주파수에서의 진동 크기) 또는 "총 진동"에 대한 단일 숫자로 측정할 수 있습니다.

시간 영역에서 진동을 보면 서로 다른 순간에 진동하는 표면의 순간 위치를 알 수 있습니다.
주파수 영역에서 진동을 보면 서로 다른 주파수에서 진동의 크기를 알 수 있습니다.
진동 측정은 때때로 다른 값의 간접 측정으로 사용됩니다. 최종 측정 목표에 따라 측정 진동에 대한 접근 방식이 결정됩니다. 종종 마모, 피로 및 고장을 예측하거나 모니터링하는 상태 모니터링에는 물체에 작용하는 운동 에너지와 힘을 결정하기 위한 진동 측정이 필요합니다. 이것을 종종 관성 진동이라고 합니다.
중요한 응용 분야에서 기계 모터(특히 베어링)를 모니터링하는 것이 그 예입니다. 이러한 경우 가속도 측정은 물체의 질량을 알고 있다고 가정할 때 힘 단위로 쉽게 변환할 수 있습니다.
다른 응용 분야에서는 의도하지 않은 변위가 시스템의 성능을 저하시키기 때문에 관심 대상의 변위와 관련이 있습니다. 하드 디스크 드라이브 및 공작 기계는 이러한 유형의 진동 측정의 예이며, 위치 진동 또는 상대 진동이라고도 합니다.
임펄스 및 연속 진동 측정
진동에 대한 두 가지 추가 시나리오는 연속 진동 측정과 임펄스 진동 측정입니다. 지속적인 진동 측정은 상태 모니터링 및 작동 테스트에 사용됩니다. 실제 작동 조건에서 관심 대상에 어떤 일이 발생하는지 직접 측정합니다.
임펄스 진동 측정에는 충격력을 측정하는 "보정된 해머"로 물체를 두드린 다음 물체의 결과 진동을 측정하는 것이 포함됩니다. 이러한 유형의 테스트는 물체 내의 공진을 나타내어 작동 조건에서 물체의 거동을 예측하는 데 도움이 됩니다. 이는 종종 응용 분야에 따라 공진 주파수를 피하거나 강조하기 위한 설계 고려 사항으로 이어집니다.
진동 측정 장비 및 진동 센서 기술
진동은 가속도, 속도 또는 변위로 측정됩니다. 각각에는 장점과 단점이 있으며 각 진동 측정 장치는 변환으로 인해 잠재적으로 불리한 결과를 초래할 수 있지만 다른 것으로 변환 할 수 있습니다. 가속도 및 변위는 진동 측정의 가장 일반적인 방법입니다.
가속도계로 진동 측정
가속도계는 진동하는 물체의 표면(또는 내부)에 직접 설치되는 작은 장치입니다. 그들은 스프링처럼 작동하는 유연한 부품에 의해 매달려있는 작은 덩어리를 포함합니다. 가속도계가 움직이면 작은 질량이 가속 속도에 비례하여 편향됩니다. 다양한 감지 기술을 사용하여 질량의 편향량을 측정할 수 있습니다. 질량과 스프링 힘을 알고 있기 때문에 처짐의 양은 가속도 값으로 쉽게 변환됩니다. 가속도계는 하나 이상의 축에서 가속도 정보를 제공할 수 있습니다.
물체에 작용하는 힘이 중요한 요소인 관성 진동 측정은 가속도계에서 잘 수행되지만 가속도계는 주파수에 민감합니다. 더 높은 주파수의 진동은 더 낮은 주파수의 진동보다 더 큰 가속도를 갖습니다. 이러한 이유로 가속도계는 저주파 진동에 대해 매우 낮은 신호 레벨을 생성하며 신호 대 잡음비가 낮을 수 있습니다. 또한 적분을 사용하여 속도를 도출하거나 이중 적분을 사용하여 변위 값을 도출하면 고주파 신호가 감소합니다.
관심 물체에 가속도계를 부착하면 물체의 질량이 변경되어 자연 공진 주파수가 변경됩니다. 물체의 질량이 가속도계의 질량보다 상당히 클 때, 종종 그렇듯이, 그 효과는 무시할 수 있습니다. 그러나 더 작은 물체에 대한 가속도계의 사용을 제한합니다.
가속도계는 더 높은 주파수에서 진동하는 더 큰 물체에 탁월한 선택이며, 물체에 작용하는 관성력을 측정해야 합니다.
비접촉식 변위 센서로 진동 측정
정전식 비접촉식 변위 센서
비접촉식 변위 센서는 센서(프로브)와 진동하는 물체의 표면 사이에 작은 간격으로 장착됩니다. 정전용량형 및 와전류 변위 센서는 고분해능, 고속 측정을 위한 최상의 선택입니다. 출력은 변위 측정이기 때문에 상대 진동(위치 진동) 측정에 적합합니다. 이러한 측정은 어느 순간에 진동하는 물체 표면의 물리적 위치가 중요한 요소일 때 이루어집니다.
10kHz 이상, 최대 80kHz의 주파수 응답과 나노미터의 낮은 분해능을 갖춘 이 센서는 물체가 고속으로 움직일 때에도 물체의 정확한 순간 위치를 나타냅니다.
와전류 비접촉식 변위 센서
센서가 물체에 장착되지 않기 때문에 물체의 질량이나 공진 특성을 변경하지 않습니다. 이 센서는 DC에서 정격 주파수 응답에 가까운 주파수 응답까지 균일한 주파수 응답을 갖습니다. 출력은 진동 주파수의 영향을 받지 않기 때문에 주파수 스펙트럼 전체에서 측정이 더 정확합니다.
이러한 센서의 변위 데이터를 미분하여 속도 정보를 제공하고 두 번째로 미분하여 가속도 정보를 얻을 수 있습니다. 차별화 프로세스는 저주파 신호를 제한하고 고주파 신호를 강조합니다. 이로 인해 더 높은 주파수에서 신호 대 잡음비가 낮아집니다.
순간 및 전체 진동
"총 진동"은 진동 신호의 TIR(peak-to-peak) 캡처로 측정할 수 있습니다.
변위 센서는 오실로스코프 또는 데이터 수집 시스템을 통해 실시간으로 관찰할 수 있는 출력을 생성합니다. 이 실시간 순간 데이터는 정확한 진동 데이터를 제공하여 회전 부품의 시간 또는 각도 위치의 함수로 기계의 성능을 결정하는 데 사용할 수 있습니다.
다른 응용 분야에서는 간단한 "총 진동" 수치가 필요합니다. 이러한 숫자를 얻으려면 센서 출력을 처리해야 합니다. Elite 시리즈 정전식 변위 센서를 사용하는 경우 MM190 신호 처리 및 미터 모듈이 총 진동 측정값을 도출할 수 있습니다. 피크 캡처 기능에는 가장 음수적인 측정값과 가장 긍정적인 측정값 간의 차이를 표시하는 TIR(Total Indicator Reading) 옵션이 포함됩니다. 재설정 버튼은 캡처된 값을 지워서 새 값을 캡처할 수 있습니다. 이 단일 피크 대 피크(peak-to-valley) 측정은 전체 진동을 나타냅니다.

"총 진동"의 변화는 MM190 모듈의 추적 TIR 옵션으로 측정할 수 있습니다.
진동 값이 시간이 지남에 따라 변할 것으로 예상되는 경우, 예를 들어 기계 시스템을 조정하는 동안 추적 TIR 옵션을 사용할 수 있습니다. 추적 TIR은 피크 대 피크 값을 표시하지만 피크 값은 0을 향해 천천히 감소할 수 있습니다. 이러한 방식으로 표시기는 값이 감소하더라도 몇 초 후에 현재 TIR 값을 표시합니다. 이 기능은 피크 값을 수동으로 재설정할 필요 없이 전체 진동을 줄일 수 있는 것을 결정하기 위해 물체 환경에 대한 실험을 용이하게 합니다.
변위 센서 프로브 장착
진동을 측정할 때 변위 센서도 진동에 노출될 가능성이 있습니다. 진동이 센서 자체에 미치는 영향을 최소화하려면 센서를 단단히 장착해야 합니다. 나사산 몸체가 단단한 마운트로 조여진 프로브는 진동 영향을 최소화하는 데 필요한 강성을 제공해야 합니다.

클램프 장착되는 매끄러운 원통형 프로브는 진동 환경의 영향을 받을 가능성이 더 높기 때문에 신중한 고려가 필요합니다. 원통형 프로브에는 다양한 클램프 장착 방법이 있습니다. 어떤 것들은 다른 것들보다 낫습니다. 고분해능으로 측정할 때 마운팅 설계는 측정 품질에 중요한 역할을 하기 시작합니다.
일반적인 장착 방법은 프로브를 고정하기 위해 고정 나사가 있는 관통 구멍입니다. 서브미크론 수준에서 측정하지 않는 안정적이고 진동하지 않는 환경에서 측정하는 경우 이 방법으로 충분한 경우가 많습니다. 그러나 이 시스템은 프로브를 두 지점(고정 나사 및 고정 나사 반대쪽 지점)에만 고정하므로 적어도 하나의 축에서 약간의 움직임이 자유로울 수 있습니다. 진동 환경에서 고분해능 측정을 위해서는 더 나은 시스템이 필요합니다.
원통형 프로브에 관통 구멍이 조여지는 "핀치 클램프" 마운트가 더 나은 솔루션입니다. 전체 둘레 클램프는 프로브 표면의 더 많은 부분과 맞물리고 보다 안정적인 마운트를 제공합니다. 그러나 프로브 또는 스루 홀의 진원도가 맞지 않으면 고정 나사의 2 점 클램프처럼 작동하기 시작할 수 있습니다.
가장 안정적인 클램핑 방법은 전체 둘레가 아닌 3개 또는 4개 지점에서 프로브를 클램핑하는 핀치 클램프를 사용합니다. 이 방법은 프로브 본체 또는 클램프의 스루홀의 진원도 오류에도 불구하고 안정적으로 유지됩니다.
추가적인 정전식 변위 센서 장착 고려 사항
용량성 변위 센서는 프로브 감지 영역 직경의 약 130%에 해당하는 "스폿 크기"를 측정합니다. 측정 대상 영역이 이보다 작으면 오류가 발생하기 쉽고 특별한 보정이 필요할 수 있습니다.
다중 용량성 프로브
여러 용량성 프로브가 동일한 대상과 함께 사용되는 경우 드라이브 전자 장치를 동기화해야 합니다. Lion Precision 다중 채널 용량 성 센서 시스템 (Elite 시리즈 및 CPL230)은 동기화 된 전자 장치를 사용합니다. 정전 용량 센서는 인접한 프로브 사이에 최소 거리가 필요하지 않습니다.
정전식 센서에 대한 환경적 고려 사항
정전식 센서는 깨끗하고 건조한 환경이 필요합니다. 프로브와 타겟 사이의 재료 변화는 측정에 영향을 미칩니다.
습도의 일반적인 변화는 용량성 변위 측정에 영향을 미치지 않습니다. 90% 범위의 습도가 측정에 영향을 미치기 시작할 수 있습니다. 측정 영역에 응결이 있으면 측정이 무효화됩니다.
와전류 변위 센서 장착 시 추가 고려 사항
전류 변위 센서는 프로브 끝을 감싸는 자기장을 사용합니다. 결과적으로 와전류 변위 센서의 "스폿 크기"는 프로브 직경의 약 300%입니다. 이는 프로브에서 세 개의 프로브 직경 내에 있는 모든 금속 물체가 센서 출력에 영향을 미친다는 것을 의미합니다.
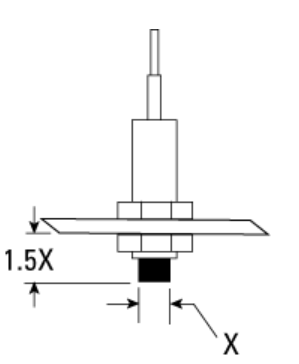
이 자기장은 또한 프로브의 축을 따라 프로브 후면으로 확장됩니다. 이러한 이유로 프로브의 감지면과 장착 시스템 사이의 거리는 프로브 직경의 1.5배 이상이어야 합니다. 와전류 변위 센서는 프로브 주위에 적절하게 설계된 카운터 보어가 존재하지 않는 한 장착 표면과 같은 높이로 장착할 수 없습니다.

프로브 근처의 간섭 물체가 불가피한 경우, 이상적으로는 고정 장치의 프로브로 수행되는 특수 보정을 수행해야 합니다.
다중 와전류 프로브
동일한 대상에 여러 프로브를 사용하는 경우 채널 간의 간섭을 방지하기 위해 최소 3개의 프로브 직경으로 분리해야 합니다. 이것이 불가피한 경우 간섭을 최소화하기 위해 특수 공장 교정이 가능합니다.
와전류 센서에 대한 환경적 고려 사항
와전류 센서를 사용한 선형 변위 측정은 측정 영역의 이물질에 영향을 받지 않습니다. 와전류 비접촉 센서의 가장 큰 장점은 다소 적대적인 환경에서 사용할 수 있다는 것입니다. 모든 비전도성 물질은 와전류 센서에 보이지 않습니다. 가공 공정의 칩과 같은 금속 재료조차도 너무 작아서 센서와 크게 상호 작용할 수 없습니다.
와전류 센서는 온도에 어느 정도 민감하지만 시스템은 15.65%F.S./°C 미만의 드리프트로 0°C에서 01°C 사이의 온도 변화에 대해 보상됩니다.
습도의 변화는 와전류 변위 측정에 영향을 미치지 않습니다.
'데이터계측분석 > 데이터계측 기술자료' 카테고리의 다른 글
| 소음 분석 방법과 분석장비 (0) | 2023.06.03 |
|---|---|
| 가속도센서를 이용한 진동측정 (0) | 2023.06.01 |
| 소음이란? Noise (0) | 2023.05.31 |
| 소음 측정 단위 (데시벨 - Decibel) (0) | 2023.05.25 |
| 속도와 거리로 가속도 계산하기 (0) | 2023.05.23 |