PID(Proportional-Integral-Derivative) 제어는 오늘날 제어 및 자동화 어플리케이션의 90% 이상을 차지하는데, 이는 주로 구현하기에 효과적이고 간단한 솔루션이기 때문입니다.
원래는 선형 시불변 시스템을 위한 것이었지만 PID 알고리즘이 발전하여 엔지니어가 복잡한 동역학을 가진 시스템도 제어할 수 있게 되었습니다. 모든 시스템에는 PID와 같은 고전적인 피드백 제어를 사용할 때 문제가 되는 비선형 구성 요소가 있습니다. 게인 스케줄링 및 캐스케이드 PID와 같은 몇 가지 소프트웨어 기술의 도움으로 이제 동일한 PID 알고리즘을 사용하여 비선형 시스템도 제어할 수 있습니다.
클래식 컨트롤
피드백 제어는 고대부터 기계 시스템 제어에 사용되어 왔습니다. 원래 이러한 시스템은 온도, 속도 및 유체 레벨을 제어하기 위해 플로트 밸브와 같은 기계적 수단을 사용했습니다. 최신 컴퓨터 기반 제어 시스템은 센서 측정을 수행하고 원하는 설정값과 비교한 다음 이 차이를 기반으로 제어 출력을 조정하여 피드백을 활용합니다.
예를 들어, 온도 제어는 현재 온도를 측정하고 원하는 온도 값과 비교한 다음 히터 또는 팬을 사용하여 온도를 원하는 설정값에 더 가깝게 이동시켜 수행할 수 있습니다. 그런 다음 최상의 응답을 얻기 위해 제어 출력을 얼마나 조정해야 하는지 파악하는 것이 과제입니다. 히터를 끝까지 켜야 합니까 아니면 일부만 켜야 합니까?
기본 PID 제어기는 단일 입력을 설정값과 비교하고 단일 출력값을 계산하여 시스템을 제어하며, 알고리즘은 응답이 선형이며 시간이 지나도 변하지 않는다고 가정합니다. 그러나 이러한 기준을 반드시 충족하지 않는 시스템에 동일한 PID 알고리즘을 적용하는 특정 기술이 있습니다.
이득 스케줄링
엔지니어가 비선형 시스템에서 PID를 사용하는 한 가지 방법은 이득 스케줄링 기술을 사용하는 것입니다. PID 제어에서 성능 문제를 경험하는 가장 일반적인 이유는 P, I 및 D에 대해 잘못된 이득 파라미터가 선택되기 때문입니다. 비선형 시스템의 경우 시스템이 어떤 "상태"에 있는지에 따라 최적 매개변수가 변경될 수 있습니다.
예를 들어, 많은 시스템은 워밍업 단계에서 일정 시간 동안 실행된 후와 다른 특성을 나타냅니다. 또 다른 예는 특정 설정점에 도달하면 다른 이득 파라미터를 사용하는 것인데, 이는 시스템이 정상 상태에서 한 번 다르게 응답하기 때문입니다. 이득 스케줄링은 시스템 상태에 따라 P, I 및 D의 이득 파라미터를 수정하는 프로세스입니다.
이러한 상태는 일정 기간 또는 시스템 입력을 사용하여 정의할 수 있습니다. 이 방법은 역학의 예측 가능한 변화가 있는 시스템에 가장 적합하므로 미리 결정된 이득을 계산하고 적용할 수 있습니다. 이득 스케줄링은 누군가에게 선형 특성을 근사화하는 섹션으로 분할하여 비선형성으로 프로세스를 제어할 수 있는 기능을 제공합니다. 그런 다음 각 섹션을 시스템을 최적으로 제어하는 다른 매개변수 세트로 조정할 수 있습니다. LabVIEW의 PID 툴킷을 사용하면 구현하기가 매우 쉽습니다.

그림 1은 PID 게인 Schedule.vi 사용하여 설정값과 측정값 간의 전류 차이를 기반으로 PID.vi 에 대한 PID 게인 파라미터를 설정하는 방법을 보여줍니다. 이 예에서는 온도 센서를 측정한 다음 사용자 정의 설정값과 비교합니다. 오차 항이라고도 하는 두 값 간의 차이가 계산된 다음 이득 스케줄러로 전송됩니다.
스케줄러 자체는 단순히 입력을 기반으로 인덱싱되는 PID 이득의 배열입니다. 온도가 설정값에 가까워지면 다른 이득 파라미터 세트를 사용하여 더 나은 제어 응답을 얻을 수 있습니다. 이득 스케줄링을 구현하는 방법에는 여러 가지가 있으며, 이 특정 방법은 입력이 설정점에 가깝게 안정화되면 적분 이득 또는 I 항을 증가시켜 정상 상태 오류를 줄이는 데 유용합니다.
일체형 와인드업 피하기
PID 제어기의 적분 파라미터는 시스템의 오차 항을 연속적으로 합산하며, 이는 정상 상태 오차를 줄이는 데 매우 효과적입니다. 이 오류를 지속적으로 통합하는 불행한 부작용은 "와인드 업"의 가능성입니다. 이는 누적된 오류로 인해 측정된 신호가 컨트롤러의 I 항을 기준으로 원하는 설정값을 초과하게 되는 경우입니다.
이것은 또한 긴 지연 및 기타 불안정한 효과를 초래합니다. 응용 분야에 따라 오버슈트는 비용이 많이 들고 재료 손실 또는 주변 하드웨어 손상으로 인해 위험할 수도 있습니다. 그럼에도 불구하고 특정 설정점에 도달하려고 할 때 적분 항은 오버슈트를 거의 불가피하게 만듭니다. 일체형 와인드업의 효과를 줄이는 한 가지 기술은 시스템이 설정값 근처에서 안정화되기 시작하면 누적된 오류를 재설정하는 것입니다.
PID 함수를 재설정하면 적분 항을 사용하여 정상 상태 오차를 줄이는 이점을 얻을 수 있지만 오버슈트가 많이 발생하지 않습니다. 다음은 LabVIEW에서 어떻게 구현할 수 있는지에 대한 예입니다.
이득 스케줄링 예제와 유사하게, 그림 2는 온도 센서를 읽은 다음 사용자 정의 설정값 값과 비교하는 것을 보여준다. 오차 항이 계산되고 특정 값(이 경우 0.25) 내에 있으면 PID 기능이 재설정된 다음 해당 시점부터 정상 상태 오차만 통합됩니다.
비 SISO 시스템
PID 알고리즘은 단일 입력, 단일 출력(SISO) 시스템을 위한 것이지만, 소프트웨어 사용자 지정을 통해 다중 입력, 다중 출력(MIMO) 시스템에서 이 컨트롤러를 사용할 수 있는 여러 가지 방법이 있습니다.
o 다양한 출력에 대한 케이스 구조 – 포지티브 및 네거티브
o 병렬 루프 PID
o 다중 PID
그림 3에는 온도 센서에서 나오는 단일 입력이 있지만 온도를 변경하는 데 사용되는 두 개의 컨트롤러 출력 또는 액추에이터가 있습니다. PID는 양수 값과 음수 값을 모두 출력할 수 있으므로 이 예제에서는 케이스 구조를 사용하여 각 액추에이터가 사용될 시기를 결정합니다.
출력 채널 1이 히터에 연결되고 출력 채널 2가 시스템 냉각을 위해 팬에 연결된다고 가정해 보겠습니다. PID 출력 값이 양수이면 히터에 출력 값을 쓰고 채널 2에 1을 써서 팬을 꺼서 온도를 높이고 싶습니다. 그러나 PID 출력 값이 음수이면 false case 구조는 출력 값을 팬에 쓰고 0을 출력 채널 1에 씁니다.
이것은 여러 출력으로 PID를 구현하는 매우 일반적인 방법입니다.
캐스케이드 PID
이 예에서는 첫 번째 PID 함수의 출력을 두 번째 PID 함수의 입력으로 전송하므로 응답 시간이 느려지고 액추에이터로의 출력이 부드러워집니다. 캐스케이드 PID를 구현하는 보다 일반적인 방법은 시스템에서 두 개의 입력을 사용하여 위치 및 속도에 대한 정보를 제공하는 것입니다. 이 다중 입력, 단일 출력(MISO) 시스템은 모션 또는 위치 제어 애플리케이션에 매우 일반적입니다.
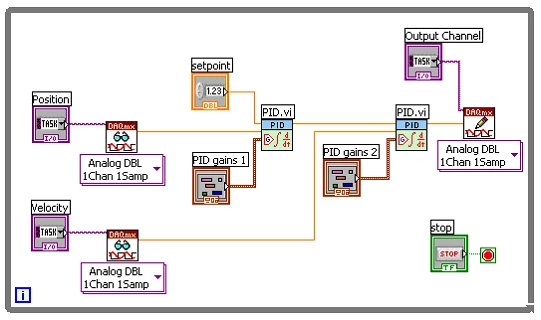
위치 인코더를 원하는 설정값과 비교하면 계산된 출력이 속도 제어의 설정값이 됩니다. 이는 시스템에 속도에 비례하는 고유한 지연이 있는 경우에 특히 유용합니다. 예를 들어, 마찰로 인해 위치가 변경되는 속도에 따라 시스템이 지연됩니다.
피드포워드 제어 기능이 있는 PID
외란 디커플링은 교란에 대한 응답이 느린 시스템에 도움이 되는 기본 PID 제어의 변형입니다. 외란을 측정할 수 있는 경우 보상기 출력을 즉시 조정하여 응답할 수 있습니다. 예를 들어, 팬이 온도 챔버에 찬 공기를 유입하는 경우 먼저 온도 센서 근처에서 온도가 떨어질 때까지 기다리지 않고 히터 출력을 즉시 높일 수 있습니다.

위의 그림에서 외란 센서가 측정되고 일부 사용자 정의 이득 값을 곱한 다음 PID 출력 값에 추가됩니다. 교란이 증가하면 시스템 제어를 유지하기 위해 보상기 출력 채널이 즉시 증가합니다. 기존 PID 보상기에서 비례 이득을 높이면 외란 제거도 개선되고 외란을 측정할 필요가 없기 때문에 이 접근 방식이 항상 필요한 것은 아닙니다.
'프로그래밍 > 랩뷰 기술자료' 카테고리의 다른 글
| PID 제어 이론 (0) | 2023.05.17 |
|---|---|
| 랩뷰를 이용한 진동 분석 및 신호 처리 (0) | 2023.05.17 |
| 커브 피팅의 이론 및 랩뷰 커브 피팅 구현방법 (0) | 2023.05.04 |
| 랩뷰 기반 NI-DAQmx 어플리케이션 배포용 설치 프로그램 만들기 (0) | 2023.04.30 |
| 랩뷰 수식 노드 사용 (0) | 2023.04.23 |