전기 모터는 전기 에너지를 받아 기계적 에너지를 생성합니다. 전기 모터는 다양한 등급과 크기로 제공됩니다. 대형 전기 모터의 일부 응용 분야에는 엘리베이터, 압연기 및 전기 열차가 포함됩니다. 소형 전기 모터의 일부 응용 분야는 로봇, 자동차 및 전동 공구입니다. 전기 모터는 DC(직류) 모터와 AC(교류) 모터의 두 가지 유형으로 분류됩니다. AC 및 DC 모터의 기능은 전기 에너지를 기계적 에너지로 변환하는 것과 동일합니다.
이 둘의 기본적인 차이점은 AC 모터용 AC 소스인 전원 공급 장치와 DC 모터용 배터리와 같은 DC 소스입니다. AC 및 DC 전기 모터는 모두 고정 부품인 고정자와 모터의 회전 부품 또는 전기자인 회전자로 구성됩니다. 전기 모터의 작동 원리는 회전 속도와 토크를 생성하기 위해 고정자에 의해 생성된 자기장과 회전자에 흐르는 전류의 상호 작용을 기반으로 합니다.
DC 모터에는 여러 종류가 있으며 모두 동일한 원리로 작동합니다. DC 모터는 제어 가능한 회전 속도로 연속 운동을 생성하는 데 사용되는 전기 기계 액추에이터입니다. DC 모터는 속도 제어 및 서보 유형 제어 또는 위치 지정이 필요한 응용 분야에 사용하기에 이상적입니다.
DC 모터

모든 모터는 고정자와 회전자의 두 부분으로 구성됩니다. 구성 및 구성에 따라 DC 모터에는 브러시 모터, 브러시리스 모터 및 서보 모터의 세 가지 유형이 있습니다.
DC 모터의 작동 원리
전기 기계 에너지 변환 장치는 입력에서 전기 에너지를 취하고 출력 측에서 기계적 에너지를 생성합니다. 이 작업에 광범위하게 사용되는 세 가지 전기 기계(DC 모터, 유도 또는 비동기 모터 및 동기 모터)가 있습니다. 유도 전동기와 동기 전동기는 AC 전동기입니다. 모든 모터에서 코일을 연결하는 자속이 변경되면 전기 에너지가 기계적으로 변환됩니다.
전기 모터는 전기 에너지를 입력으로 받아 기계적 에너지로 변환합니다.

전동기
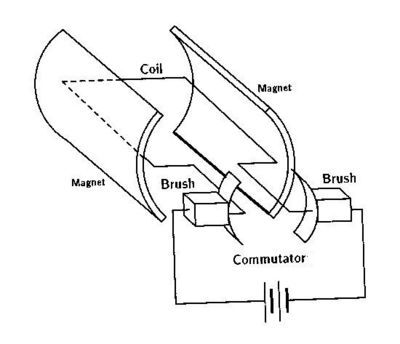
자기장의 방향에 수직으로 배치된 도체에 전기 에너지가 가해지면 도체를 통해 흐르는 전류와 자기장 사이의 상호 작용의 결과가 힘입니다. 이 힘은 전류와 자기장 모두에 수직인 방향으로 도체를 밀어냅니다., 그러므로, 힘은 본질적으로 기계적입니다.
힘의 값은 자기장 B의 밀도, 도체 L의 길이 및 도체 I에 흐르는 전류를 알고 있으면 계산할 수 있습니다.
도체에 가해지는 힘은 다음과 같이 주어집니다.
F = B×I×L Newtons
Conductor의 움직임 방향은 플레밍의 왼손 법칙으로 결정할 수 있습니다.
플레밍의 왼손 법칙은 모든 전기 모터에 적용됩니다.
플레밍의 왼손 법칙을 나타내는 그림은 다음과 같습니다.

전류를 전달하는 도체가 자기장에 놓이면 자기장과 전류의 두 방향에 수직인 힘이 도체에 작용합니다.
플레밍의 왼손 법칙에 따르면 왼손 엄지 손가락은 힘의 방향, 집게 손가락은 자기장의 방향, 가운데 손가락은 전류의 방향을 나타냅니다.
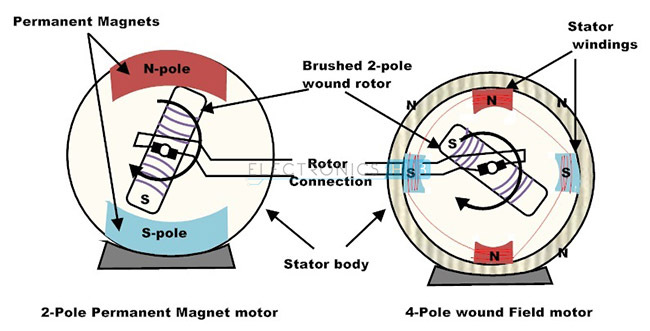
DC 모터는 전기자 권선과 계자 권선이라는 두 세트의 코일로 구성됩니다. 계자 권선은 자기장을 생성하는 데 사용됩니다. 이를 위해 영구 자석 세트도 사용할 수 있습니다. 계자 권선을 사용하는 경우 전자석입니다. 계자 권선은 모터 또는 고정자의 고정 부분입니다. 전기자 권선은 모터의 로터 부분입니다. 회전자는 고정자 내부에 배치됩니다. 회 전자 또는 전기자는 기계적 정류자를 통해 외부 회로에 연결됩니다.
일반적으로 페로 자성 재료는 에어 갭으로 분리된 고정자와 회전자를 만드는 데 사용됩니다. 고정자 내부의 코일 권선은 여러 코일의 직렬 또는 병렬 연결로 만들어집니다. 구리 권선은 일반적으로 전기자 권선과 필드 권선 모두에 사용됩니다.

DC 모터의 작동 원리
자속 밀도가 B Tesla인 자기장에 배치된 코일을 고려하십시오. 코일을 DC 공급 장치에 연결하여 직류를 공급하면 코일 길이를 통해 전류 I가 흐릅니다. 코일의 전류는 자기장과 상호 작용하며 그 결과 로렌츠 힘 방정식에 따라 코일에 힘이 가해집니다. 힘은 자기장의 강도와 도체의 전류에 비례합니다.
DC 모터에도 동일한 원리가 사용되며 전기자에 감긴 여러 개의 코일로 구성되며 모든 코일은 동일한 힘을 경험합니다. 이 힘의 결과는 뼈대의 회전입니다. 자기장에서 도체가 회전하면 토크가 발생합니다. 도체와 연결되는 자속은 자기장에서 코일의 다른 위치에서 다르며 이로 인해 전자기 유도의 패러데이 법칙에 따라 코일에서 기전력을 유도합니다. 이 emf를 역기전력이라고 합니다. 이 emf의 방향은 도체에 전류가 흐르는 공급 전압과 반대입니다. 따라서 전기자에 흐르는 전류의 총량은 공급 전압과 백 emf의 차이에 비례합니다.
DC 모터의 전기적 등가물은 다음과 같습니다.

DC 모터 등가 회로
DC 모터 전기 등가 회로는 필드 회로와 전기자 회로의 두 회로로 나뉩니다. 필드 회로는 자기장을 담당하며 별도의 DC 전압 V가 공급됩니다f. 계자 권선의 저항과 인덕턴스는 R로 표시됩니다f 및 Lf. 전압의 결과로, 전류 If 권선에서 생성되며 필요한 자기장을 설정합니다.
전기자에서 전압 VT 모터의 단자에 인가되고 전류 Ia 전기자 회로에 흐릅니다. 전기자 권선의 저항은 Ra이고 전기자에서 유도되는 총 전압은 Eb입니다
.
Kirchhoff의 전압 법칙을 두 회로에 적용하면,
Vf = If * Rf
VT = Ia * Ra + Eb
모터에서 발생하는 토크는 다음과 같습니다.
T = K * Ia * Φ
여기서 k는 코일 기하학에 따라 일정하고 Φ는 자속입니다.
모터의 전력은 Eb * Iad입니다.
기계적 형태로 변환된 동력인 발전된 동력은 다음과 같습니다.
P = T * ωn
여기서 ω는 각속도입니다.
이것은 유도 전기자 전압에 전달되는 총 전력이며
Eb * Ia = T * ωn
DC 모터의 종류
DC 모터는 주로 로터에 전원이 공급되는 방식으로 두 가지 유형으로 분류됩니다. 브러시 DC 모터와 브러시리스 DC 모터입니다. 이름에서 알 수 있듯이 브러시는 정류자를 통해 회전하는 전기자에 전류를 공급하기 위해 브러시 DC 모터에 존재하는 반면 브러시리스 DC 모터에서는 영구 자석 로터를 사용하므로 브러시가 필요하지 않습니다.
브러시 DC 모터
이러한 유형의 모터에서는 전류를 회전자 내부에 있는 정류자와 브러시에 통과시킴으로써 자기장이 생성됩니다. 따라서 브러시 모터라고 합니다. 브러시는 탄소로 구성되어 있습니다. 이 모터는 별도로 여기되거나 자체 여기될 수 있습니다.
모터의 스테이터 부분은 필요한 대안적인 북극과 남극이 형성되도록 원형 방식으로 연결된 코일로 구성됩니다. 이 코일 설정은 로터 코일 권선 형성 직렬 권선 DC 모터 및 션트 권선 DC 모터와 직렬 또는 병렬일 수 있습니다. DC 모터의 아마추어 또는 로터 부분은 기본적으로 한쪽 끝에 연결된 전류 운반 도체인 정류자로 구성되며, 이는 전기적으로 절연된 구리 세그먼트에 연결됩니다. 아마추어가 회전함에 따라 브러시를 통해 정류자에 외부 전원을 연결할 수 있습니다.
브러시 DC 모터 유형
DC 모터는 전기자 권선과 전기장 권선의 전기적 연결에 따라 분류되며, 서로 다른 연결 형태로 인해 서로 다른 유형의 모터가 발생합니다. DC 모터는 자기장의 발생에 따라 구분되며, DC 모터는 크게 세 가지 유형이 있습니다: 개별 여기형, 자체 여기형, 영구 자석. 영구 자석 타입 모터의 경우 강력한 자석을 사용하여 필요한 자기장을 발생시킵니다. 개별 여기형과 자체 여기형 모터의 경우 전자석이 고정자 구조에 배치됩니다.
자체 여기형 DC 모터는 다시 션트 여기형, 직렬 여기형 및 복합 여기형의 세 가지 유형으로 나뉩니다.
화합물 여기형 모터는 각 화합물 여기형에서 누적 화합물과 긴 션트 및 짧은 션트를 갖는 차동 화합물로 나뉩니다.
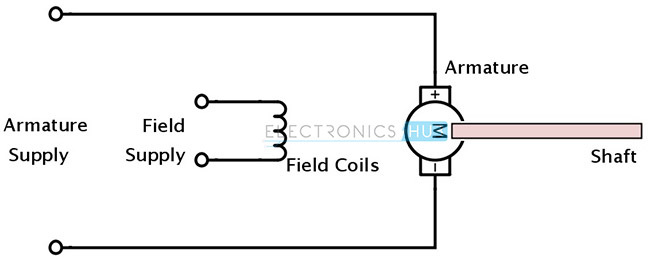
별도로 여기된 모터
이름에서 알 수 있듯이 별도로 여기 된 DC 모터는 전기자 권선 및 계자 권선에 별도의 공급 장치를 사용합니다. 이는 전기자 권선과 계자 권선이 전기적으로 서로 분리되어 있음을 의미합니다.
자기 여자 모터
자체 여기 DC 모터에서는 별도의 전압 소스 대신 계자 권선과 전기자 권선이 단일 전원에 연결됩니다. 이 연결은 션트 또는 병렬 및 시리즈의 두 가지 방법으로 만들 수 있습니다. 따라서 자기 여자 모터는 다시 션트 권선 DC 모터와 직렬 권선 DC 모터로 분류됩니다.
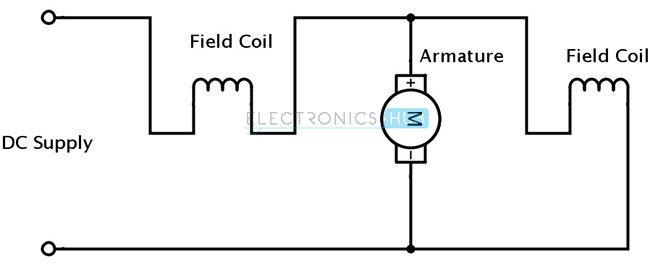
션트 DC 모터: 션트 DC 모터의 경우 계자 권선과 전기자 권선이 동일한 공급 장치를 통해 병렬로 연결되므로 계자 권선이 전체 단자 전압에 노출됩니다. 공급은 동일하지만 계자 전류와 전기자 전류는 다릅니다. 션트 DC 모터의 속도는 일정하며 출력의 기계적 부하에 따라 변하지 않습니다.
션트 DC 모터의 구조는 아래와 같습니다.
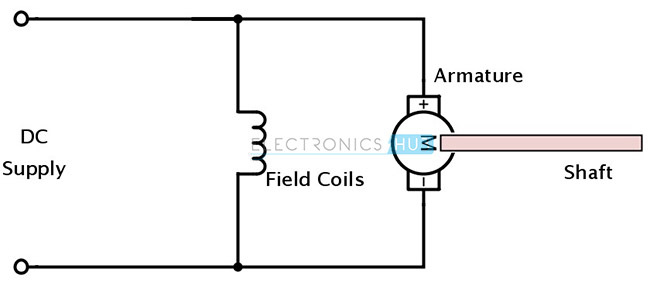
션트 DC 모터
션트 DC 모터의 전기적 등가물은 다음과 같습니다.
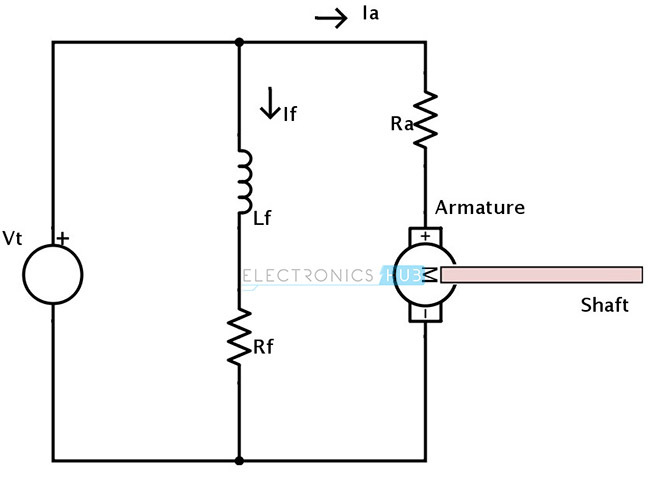
션트 DC 모터 등가 회로
만약 Eb가 모터의 뒤쪽 EMF라면
전기자 상수가 Ka이고 회전 속도가 ω이면
Eb = Ka * ω * Φ
여기서 Φ는 자속입니다.
따라서
Vt = Ka * ω * Φ + Ia * Ra
총 전류는 It = If + Ia입니다
따라서 총 출력은 P = Vt * It입니다
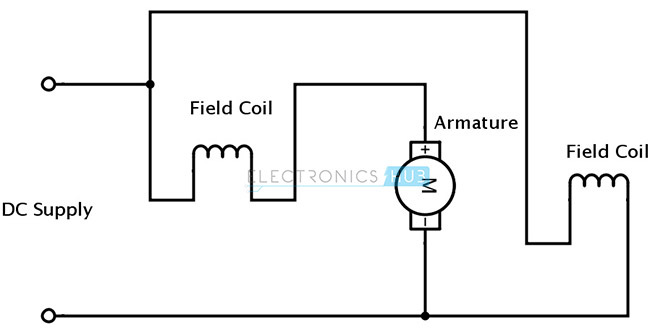
시리즈 모터: 직렬 DC 모터의 경우 계자 권선 및 전기자 권선이 전원 공급 장치와 직렬로 연결됩니다. 따라서 계자 권선과 전기자 권선에 동일한 전류가 흐릅니다.
직렬 권선형 모터는 AC 전압 공급기 또는 DC 전압 공급기와 함께 작동하므로 범용 모터라고도 합니다.
직렬 권선형 모터는 전압원의 극성에 관계없이 항상 같은 방향으로 회전합니다. 극성을 바꾸면 전기자 권선의 극성과 자기장의 방향이 동시에 반대가 되기 때문입니다. 직렬 직류 모터의 속도는 기계적 부하에 따라 달라집니다.
직렬 권선 DC 모터의 다이어그램은 아래에 나와 있습니다.
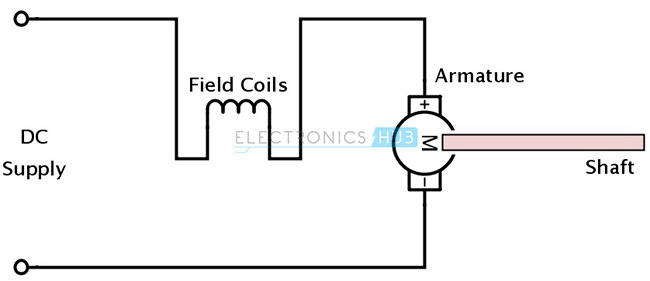
시리즈 DC 모터
직렬 DC 모터의 전기적 등가물은 다음과 같습니다.
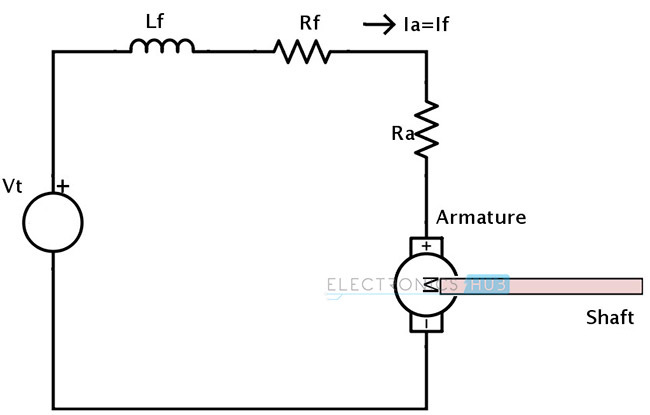
직렬 DC 모터 등가 회로
복합 모터: 복합 권선 모터는 직렬 권선과 션트 필드 권선의 조합을 사용합니다. 직렬 권선은 모터의 전기자와 직렬로 연결되고 션트 권선은 병렬로 연결됩니다.
자기장을 생성하는 두 개의 필드 회로가 있기 때문에 복합 DC 모터는 플럭스의 방향에 따라 두 가지 유형으로 더 나눌 수 있습니다. 누적 복합 DC 모터와 차동 복합 DC 모터입니다.
션트 필드의 플럭스가 직렬 필드의 플럭스를 지원하는 경우, 즉 둘 다 같은 방향에 있으면 누적 복합 DC 모터입니다. 이 경우 총 자속은 개별 자속의 합입니다.
ΦTOTAL = ΦSERIES + ΦSHUNT
누적 복합 DC 모터의 구조는 다음 그림과 같습니다.
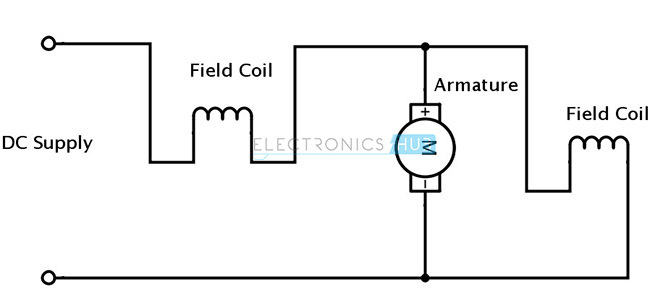
누적 복합 DC 모터 회로
전기적 등가물은 아래와 같습니다.
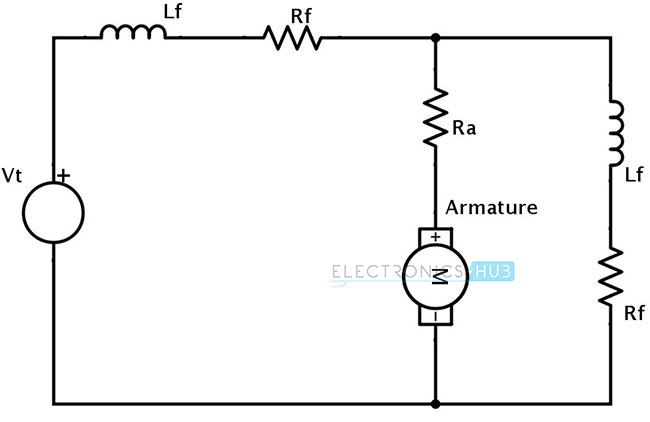
누적 복합 DC 모터 등가 회로
차동 복합 DC 모터의 경우 직렬 필드와 션트 필드에서 생성되는 플럭스는 반대 방향이며 총 플럭스는 그 차이입니다.
ΦTOTAL = ΦSERIES – ΦSHUNT
이 경우 순 플럭스는 원래 플럭스보다 작기 때문에 차동 복합 DC 모터는 많은 실용적인 응용 분야를 찾지 못합니다.
누적 및 차동 복합 DC 모터는 션트 필드 권선의 션트를 기반으로 긴 션트와 짧은 션트 장치로 더 나눌 수 있습니다.
긴 션트 모터의 경우 션트 필드 권선은 전기자 및 직렬 필드 권선과 평행합니다.
긴 션트
션트 필드 권선이 전기자에만 평행하면 짧은 션트입니다.
짧은 션트
영구 자석 DC 모터: 영구 자석 DC 모터의 경우 강력한 자석을 사용하여 자기장을 생성합니다. 따라서 영구 자석 DC 모터는 전기자 권선으로만 구성됩니다.
영구 자석 브러시 DC 모터는 아래와 같습니다.
영구 자석 브러시 DC 모터는 고정자 권선형 DC 모터보다 작고 저렴합니다. 일반적으로 사마륨, 코발트 또는 네오디뮴 철 붕소와 같은 희토류 자석은 매우 강력한 자석이고 자기장이 높기 때문에 영구 자석 DC 모터의 자석으로 사용됩니다.
영구 자석 DC 모터의 속도/토크 특성은 고정자 권선 DC 모터보다 선형입니다.
브러시 DC 모터의 단점은 고부하 조건에서 정류자와 브러시 사이에 스파크가 발생한다는 것입니다. 이로 인해 많은 양의 열이 발생하고 모터의 수명이 단축됩니다.
브러시리스 DC 모터
브러시리스 DC 모터는 일반적으로 영구 자석 회전자와 코일 권선 고정자로 구성됩니다. 로터에 영구 자석을 사용하는이 디자인은 로터 부분에 브러시가 필요하지 않습니다. 따라서 브러시 DC 모터와 달리 이러한 유형에는 브러시가 포함되어 있지 않으므로 열이 거의 발생하지 않으므로 브러시가 마모되지 않습니다.
모터에 브러시가 없기 때문에 로터의 각도 위치를 감지할 수 있는 다른 수단이 있어야 합니다. 홀 효과 센서는 반도체 스위칭 장치를 제어하는 데 필요한 피드백 신호를 생성하는 데 사용됩니다. 브러시리스 DC 모터는 브러시 DC 모터보다 비싸고 브러시 사촌보다 효율적입니다.
DC 서보 모터
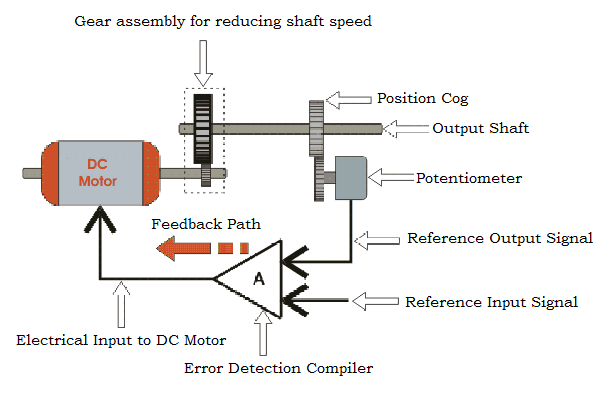
작은 DC 모터는 고속으로 회전하지만 토크는 부하를 이동시키기에 충분하지 않습니다. DC 서보 모터는 일반 DC 모터, 속도 제어용 기어박스, 제어 회로 및 위치 감지 장치의 네 부분으로 구성됩니다. 기어 박스는 고속 입력을 받아 느리지 만 실용적인 속도로 변환됩니다. 위치 감지 장치는 일반적으로 전위차계입니다. 제어 회로는 오류 감지기 증폭기입니다.
DC 서보 모터에서 샤프트의 위치는 제어 회로에 대한 피드백이므로 폐쇄 루프 애플리케이션에 사용됩니다.
전위차계는 샤프트에 연결됩니다. 이를 통해 제어 회로는 모터의 위치를 모니터링할 수 있습니다. 이 위치는 제어 회로에 의해 기준 입력 신호와 비교됩니다. 제어 회로의 출력은 모터에 대한 피드백입니다. 현재 위치와 기준 위치에 불일치가 있는 경우 오류 감지 증폭기의 출력에서 오류 신호가 생성됩니다. 이 신호에 따라 샤프트가 회전하여 필요한 위치로 이동하여 정지합니다.
대부분의 DC 서보 모터는 최대 180도까지 회전할 수 있습니다.0 어느 방향으로든. DC 서보 모터는 원격 제어 장치, 로봇 공학 및 대규모 산업 응용 분야에도 사용됩니다.
DC 모터 구동
DC 모터는 트랜지스터, 스위치 또는 릴레이를 사용하여 켜거나 끌 수 있습니다. 모터 제어의 가장 간단한 형태는 스위치 역할을 하는 바이폴라 접합 트랜지스터를 사용하는 선형 제어입니다. 구동 회로의 목적은 권선의 전류를 제어하는 것입니다. 모터의 속도는 트랜지스터의 베이스 전류의 양을 변경하여 제어할 수 있습니다.
트랜지스터가 활성 상태이면 공급 전압의 절반만 모터로 전달되므로 모터는 절반 속도로 회전합니다. 모터는 모든 공급 전압이 모터에 가면, 최대 속도로 회전합니다. 이것은 트랜지스터가 포화 상태일 때 발생합니다.
다음 회로는 모터를 한 방향으로 구동하는 데 사용됩니다.
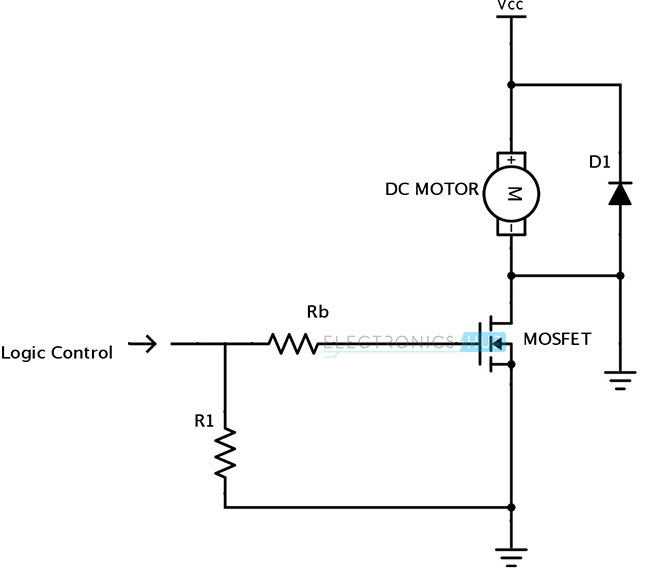
단방향 모터 구동 회로
상기 회로에서, 저항(Rb, R1)은 매우 중요합니다. 저항(Rb)은 전류 스파이크로부터 제어 회로를 보호하기 위해 사용됩니다. 저항(R1)은 입력 핀이 트라이-스테이트(tri-state)될 때 트랜지스터가 턴-오프되도록 보장합니다.
모터의 속도는 공급기의 평균 값에 비례하므로 공급 전압을 변조하여 제어할 수 있습니다.
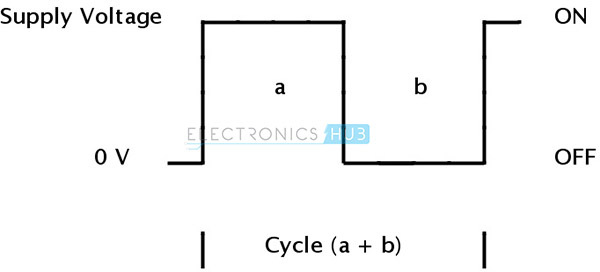
펄스 공급
ON 시간의 백분율을 듀티 사이클이라고 합니다. 위 펄스에 대한 듀티 사이클은 β = a / (a + b)로 표시됩니다.
듀티 사이클을 변경함으로써, 즉 펄스의 폭을 변경함으로써 모터의 회전 속도를 변경할 수 있습니다. 이를 PWM(Pulse Width Modulation) 기법이라고 합니다. 펄스의 폭을 변경하지 않고 속도를 변경할 수도 있습니다. 이를 펄스의 주파수를 변경함으로써 달성할 수 있습니다. 이를 PFM(Pulse Frequency Modulation)이라고 합니다.
DC 모터의 방향 변경: 위에서 언급한 구동 회로의 단점은 단방향, 즉 모터가 항상 한 방향으로 회전한다는 것입니다. 모터의 회전 방향을 변경하려면 공급 장치의 극성을 바꿔야 합니다. 이를 위해 다른 스위치를 사용할 수 있습니다.
첫 번째 연결은 DPDT(이중 극, 이중 스로우) 스위치를 사용하는 것입니다.
연결은 아래와 같습니다.
DPDT 스위치
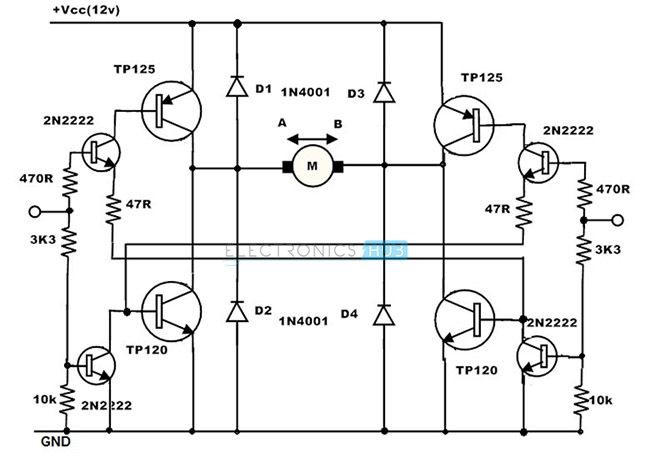
스위치가 위치 A에 있으면 모터가 정방향으로 회전합니다. 모터의 단자가 위치 B의 스위치에 연결되면 방향이 반대로 바뀝니다.
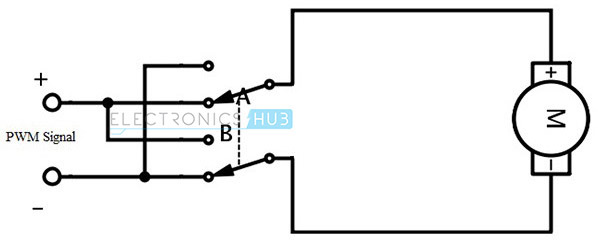
두 번째 연결은 4개의 SPST(Single Post, Single Throw) 스위치를 사용하는 것입니다.

SPST 스위치
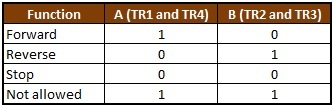
서로 다른 스위치를 조합하여 서로 다른 기능을 구현할 수 있습니다.
조합 및 각각의 동작은 다음과 같다.
A + D — 정방향
B + C — 역방향
A + B — 정지 및 제동
C + D — 정지 및 제동
모두 꺼짐 — 중지됨
H – 브리지 모터 드라이버
DC 모터의 더 나은 양방향 제어를 달성하려면 H 브리지라는 회로가 필요합니다. H-브리지라는 이름은 중앙 막대의 모터 위치와 관련된 개략도 모양으로 인해 주어집니다. 이 회로는 모터의 권선을 통해 어느 방향으로든 전류를 이동하는 데 사용할 수 있습니다.
H – 브리지 DC 모터 드라이버의 회로는 아래와 같습니다.
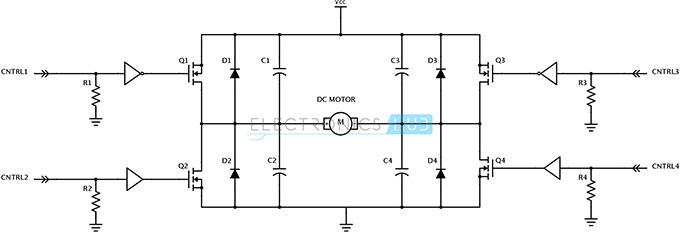
H 브리지 구동 회로
제어 신호(CNTRL(1), CNTRL(2), CNTRL(3) 및 CNTRL(4)는 트랜지스터(Q1, Q2, Q3 및 Q4)를 각각 스위치 온 및 오프하는데 사용된다.

작업은 따로 설명이 필요 없습니다. 고려해야 할 한 가지 중요한 고려 사항은 입력이 예측할 수 없을 때 모든 FET가 OFF 상태에 있어야 H-Bridge의 각 절반에 있는 트랜지스터가 동시에 켜지지 않는다는 것입니다. 따라서 각 트랜지스터에 대한 풀다운 저항이 사용됩니다.
H – 브리지 구현을 위한 또 다른 회로는 다음과 같습니다.
L293D 모터 드라이버 IC
L293D IC는 H – 브리지의 개념에서 작동하는 모터 드라이버 IC입니다. 이 IC를 사용하면 모터가 양방향으로 구동할 수 있습니다. L293D IC는 두 세트의 입력과 출력이 있는 16핀 장치입니다. 따라서 단일 IC로 두 개의 DC 모터를 제어할 수 있습니다.
L293D IC의 핀 다이어그램은 다음과 같습니다.

핀 2, 7 및 10, 15는 모터의 회전을 제어하는 데 사용되는 제어 신호입니다.
모터 1의 경우,
핀 2 = 논리 1 및 핀 7 = 논리 0 —- 순방향
핀 2 = 로직 0 및 핀 7 = 로직 1 —- 역방향
다른 조합의 경우 회전이 없습니다.
모터 2의 경우와 유사하게,
핀 10 = 로직 1 및 핀 15 = 로직 0 —–순방향
핀 10 = 논리 0 및 핀 15 = 논리 1 —–역방향.
L293D 모터 드라이버 IC를 사용하여 두 모터를 제어하는 회로는 아래와 같습니다.
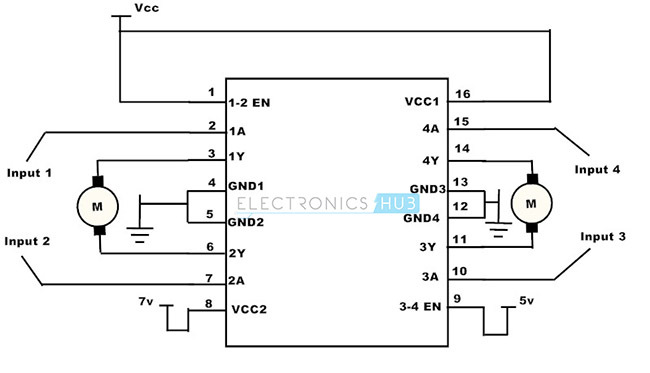
전압 공급 장치 VCC1은 내부 작동, 즉 신호를 활성화하거나 활성화 또는 비활성화하는 데 사용됩니다. 모터를 구동하기 위해 전원 VCC2가 사용됩니다. 일반적으로 VCC1 = 5V이고 VCC2 = 9V 또는 12V입니다.
'데이터계측분석 > 전기전자 기술자료' 카테고리의 다른 글
| 옴의 법칙과 전력 (0) | 2023.07.26 |
|---|---|
| DC 회로 기본 개념 (0) | 2023.07.26 |
| 16진수 Hexadecimal (0) | 2023.07.20 |
| 이진수에서 십진수 변환 (0) | 2023.07.20 |
| 바이너리 코드 - BCD (8421), 2421, Excess-3, Gray (0) | 2023.07.20 |